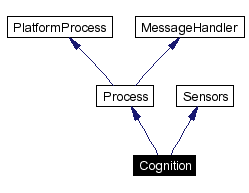
#include <Cognition.h>
Inheritance diagram for Cognition:
Public Member Functions | |
| Cognition () | |
| constructor | |
| ~Cognition () | |
| destructor | |
| virtual int | main () |
| is called from the framework once in every frame | |
| virtual void | init () |
| is called direct before the first call of main() | |
| virtual bool | handleMessage (InMessage &message) |
| The function handles incoming debug messages. | |
Protected Attributes | |
| bool | processImage |
| If true, then a new image was received in the current frame. | |
| bool | processSensorData |
| If true, then new sensor data were received in the current frame. | |
| bool | processPercepts |
| If true, then percepts were received or generated in the current frame. | |
modules | |
| ColorTableModSelector * | pColorTableMod |
| a reference to the colortable selector | |
| ImageProcessorSelector * | pImageProcessor |
| a reference to the image processor | |
| SensorDataProcessorSelector * | pSensorDataProcessor |
| a reference to the sensor data processor | |
| CollisionDetectorSelector * | pCollisionDetector |
| a reference to the collision detector | |
| RobotStateDetectorSelector * | pRobotStateDetector |
| a reference to the robot state detector | |
| BallLocatorSelector * | pBallLocator |
| a reference to the ball-locator | |
| TeamBallLocatorSelector * | pTeamBallLocator |
| a reference to the team ball locator | |
| PlayersLocatorSelector * | pPlayersLocator |
| a reference to the players-locator | |
| ObstaclesLocatorSelector * | pObstaclesLocator |
| a reference to the obstacles-locator | |
| SelfLocatorSelector * | pSelfLocator |
| a reference to the self-locator | |
| BehaviorControlSelector * | pBehaviorControl |
| a reference to the behavior control | |
| SensorBehaviorControlSelector * | pSensorBehaviorControl |
| a reference to sensor based behavior control | |
| SpecialVision * | pSpecialVision |
| a reference to the special vison module | |
representations | |
| char | colorTableBuffer [sizeof(ColorTable64) > sizeof(ColorTableTSL)?sizeof(ColorTable64) > sizeof(ColorTable32K)?sizeof(ColorTable64):sizeof(ColorTable32K):sizeof(ColorTableTSL) > sizeof(ColorTable32K)?sizeof(ColorTableTSL):sizeof(ColorTable32K)] |
| the color tables | |
| ColorTable & | colorTable |
| the color table | |
| CameraMatrix | cameraMatrix |
| The offset and rotation of the camera. | |
| LandmarksPercept | landmarksPercept |
| Detected landmarks. | |
| BallPercept | ballPercept |
| Detected balls. | |
| PlayersPercept | playersPercept |
| Detected players. | |
| ObstaclesPercept | obstaclesPercept |
| Detected obstacles. | |
| CollisionPercept | collisionPercept |
| The collision percept. | |
| LinesPercept | linesPercept |
| Detected lines. | |
| EdgesPercept | edgesPercept |
| Detected edges. | |
| BodyPercept | bodyPercept |
| Detected switches. | |
| BodyPosture | bodyPosture |
| The height and the inclination of the robot's body. | |
| PSDPercept | psdPercept |
| A spot relative to the robot that was detected by the PSD sensor. | |
| SpecialPercept | specialPercept |
| A special percept. | |
| SpecialVisionRequest | specialVisionRequest |
| The request for the specialVision module. | |
| CalibrationRequest | calibrationRequest |
| The request for calibration. | |
| SampleSetProxy< PoseSample > | selfLocatorSamples |
| The sample set proxy linked to the sample set of the active locator. | |
| TeamMessageCollection | teamMessageCollection |
| The team message collection. | |
| BehaviorTeamMessage | outgoingBehaviorTeamMessage |
| The outgoing behavior team message. | |
| JoystickData | joystickData |
| Data produced by an extern sensor called joystick. | |
| unsigned long | frameNumber |
| the color tables | |
| unsigned long | lastFrameNumber |
| the color tables | |
Private Member Functions | |
| RECEIVER (SensorDataBuffer) | |
| RECEIVER (Image) | |
| RECEIVER (GameControlData) | |
| RECEIVER (PackageMotionCognition) | |
| RECEIVER (OdometryData) | |
| NET_SENDER (TeamMessage1) | |
| NET_SENDER (TeamMessage2) | |
| NET_SENDER (TeamMessage3) | |
| NET_RECEIVER (TeamMessage1) | |
| NET_RECEIVER (TeamMessage2) | |
| NET_RECEIVER (TeamMessage3) | |
| SENDER (PackageCognitionMotion) | |
Private Attributes | |
| DEBUGGING | |
| UDP_HANDLER | |
Definition at line 56 of file Cognition.h.
|
Here is the call graph for this function:

|
|
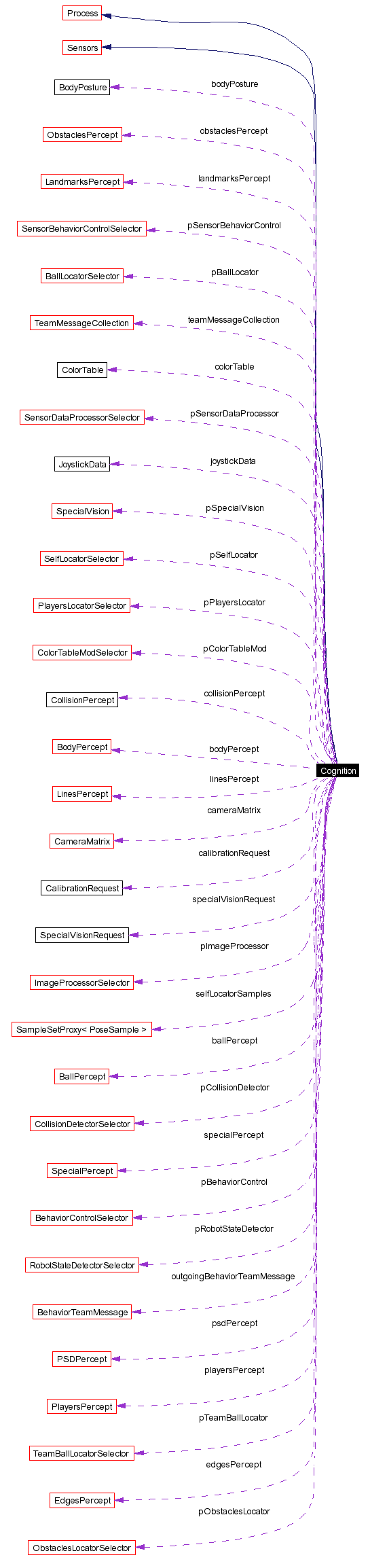
destructor
Definition at line 193 of file Cognition.cpp. References pBallLocator, pBehaviorControl, pCollisionDetector, pColorTableMod, pImageProcessor, pObstaclesLocator, pPlayersLocator, pRobotStateDetector, pSelfLocator, pSensorBehaviorControl, pSensorDataProcessor, pSpecialVision, and pTeamBallLocator. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
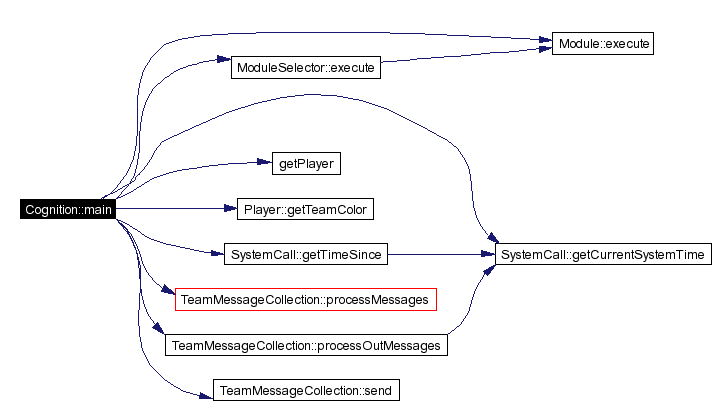
is called from the framework once in every frame
The frameNumber Implements Process. Definition at line 211 of file Cognition.cpp. References Module::execute(), ModuleSelector::execute(), SystemCall::getCurrentSystemTime(), getPlayer(), Player::getTeamColor(), SystemCall::getTimeSince(), idImage, idJPEGImage, idLowResImage, idOdometryData, idPercepts, idSensorData, idSpecialPercept, idText, idWorldState, INFO, OUTPUT, pBallLocator, pBehaviorControl, pCollisionDetector, pImageProcessor, pObstaclesLocator, pPlayersLocator, pRobotStateDetector, processImage, TeamMessageCollection::processMessages(), TeamMessageCollection::processOutMessages(), processPercepts, processSensorData, pSelfLocator, pSensorBehaviorControl, pSensorDataProcessor, pSpecialVision, pTeamBallLocator, TeamMessageCollection::send(), SEND_IMAGE, SEND_PERCEPTS, SEND_WORLD_STATE, STOP_TIME_ON_REQUEST, and WATCH. |
Here is the call graph for this function:
|
|
is called direct before the first call of main()
Reimplemented from Process. Definition at line 346 of file Cognition.cpp. References getPlayer(), getRobotConfiguration(), idText, INIT_UDP_HANDLER, OUTPUT, and START_UDP_HANDLER. |
Here is the call graph for this function:

|
Here is the call graph for this function:
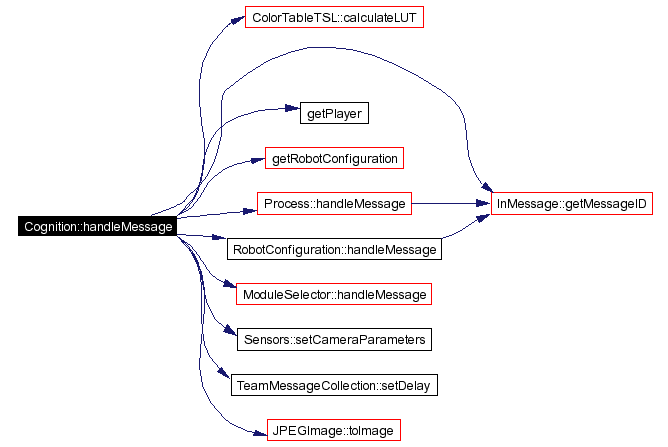
|
|
Definition at line 59 of file Cognition.h. |
|
|
Definition at line 76 of file Cognition.h. |
|
|
If true, then a new image was received in the current frame.
Definition at line 100 of file Cognition.h. Referenced by handleMessage(), and main(). |
|
|
If true, then new sensor data were received in the current frame.
Definition at line 103 of file Cognition.h. Referenced by handleMessage(), and main(). |
|
|
If true, then percepts were received or generated in the current frame.
Definition at line 106 of file Cognition.h. Referenced by handleMessage(), and main(). |
|
|
a reference to the colortable selector
Definition at line 112 of file Cognition.h. Referenced by Cognition(), and ~Cognition(). |
|
|
a reference to the image processor
Definition at line 115 of file Cognition.h. Referenced by Cognition(), handleMessage(), main(), and ~Cognition(). |
|
|
a reference to the sensor data processor
Definition at line 118 of file Cognition.h. Referenced by Cognition(), main(), and ~Cognition(). |
|
|
a reference to the collision detector
Definition at line 121 of file Cognition.h. Referenced by Cognition(), main(), and ~Cognition(). |
|
|
a reference to the robot state detector
Definition at line 124 of file Cognition.h. Referenced by Cognition(), main(), and ~Cognition(). |
|
|
a reference to the ball-locator
Definition at line 127 of file Cognition.h. Referenced by Cognition(), main(), and ~Cognition(). |
|
|
a reference to the team ball locator
Definition at line 130 of file Cognition.h. Referenced by Cognition(), main(), and ~Cognition(). |
|
|
a reference to the players-locator
Definition at line 133 of file Cognition.h. Referenced by Cognition(), main(), and ~Cognition(). |
|
|
a reference to the obstacles-locator
Definition at line 136 of file Cognition.h. Referenced by Cognition(), main(), and ~Cognition(). |
|
|
a reference to the self-locator
Definition at line 139 of file Cognition.h. Referenced by Cognition(), handleMessage(), main(), and ~Cognition(). |
|
|
a reference to the behavior control
Definition at line 142 of file Cognition.h. Referenced by Cognition(), handleMessage(), main(), and ~Cognition(). |
|
|
a reference to sensor based behavior control
Definition at line 145 of file Cognition.h. Referenced by Cognition(), main(), and ~Cognition(). |
|
|
a reference to the special vison module
Definition at line 148 of file Cognition.h. Referenced by Cognition(), main(), and ~Cognition(). |
|
|
the color tables
Definition at line 160 of file Cognition.h. Referenced by handleMessage(). |
|
|
the color table
Definition at line 162 of file Cognition.h. |
|
|
The offset and rotation of the camera.
Definition at line 165 of file Cognition.h. |
|
|
Detected landmarks.
Definition at line 168 of file Cognition.h. |
|
|
Detected balls.
Definition at line 171 of file Cognition.h. |
|
|
Detected players.
Definition at line 174 of file Cognition.h. |
|
|
Detected obstacles.
Definition at line 177 of file Cognition.h. |
|
|
The collision percept.
Definition at line 180 of file Cognition.h. |
|
|
Detected lines.
Definition at line 183 of file Cognition.h. |
|
|
Detected edges.
Definition at line 186 of file Cognition.h. |
|
|
Detected switches.
Definition at line 189 of file Cognition.h. |
|
|
The height and the inclination of the robot's body.
Definition at line 192 of file Cognition.h. |
|
|
A spot relative to the robot that was detected by the PSD sensor.
Definition at line 195 of file Cognition.h. |
|
|
A special percept.
Definition at line 198 of file Cognition.h. |
|
|
The request for the specialVision module.
Definition at line 201 of file Cognition.h. |
|
|
The request for calibration.
Definition at line 204 of file Cognition.h. |
|
|
The sample set proxy linked to the sample set of the active locator.
Definition at line 207 of file Cognition.h. |
|
|
The team message collection.
Definition at line 210 of file Cognition.h. |
|
|
The outgoing behavior team message.
Definition at line 213 of file Cognition.h. |
|
|
Data produced by an extern sensor called joystick.
Definition at line 216 of file Cognition.h. |
|
|
the color tables
Definition at line 218 of file Cognition.h. |
|
|
the color tables
Definition at line 219 of file Cognition.h. |
 1.3.6
1.3.6