#include <CollisionPercept.h>
Public Member Functions | |
| CollisionPercept () | |
| Constructor. | |
| void | reset () |
| Reset all states. | |
| ~CollisionPercept () | |
| Destructor. | |
| bool | getCollisionFrontLeft () const |
| Did collision occur at front left leg. | |
| bool | getCollisionFrontRight () const |
| Did collision occur at front right leg. | |
| bool | getCollisionHindLeft () const |
| Did collision occur at hind left leg. | |
| bool | getCollisionHindRight () const |
| Did collision occur at hind left leg. | |
| bool | getCollisionHead () const |
| Did collision occur at head. | |
| bool | getCollisionAggregate () const |
| Did collision occur at any body part. | |
| void | setFrameNumber (unsigned long frameNumber) |
| sets frame number | |
Public Attributes | |
| double | state [JointData::numOfJoint] |
| unsigned long | frameNumber |
| the last perceived frame | |
Definition at line 19 of file CollisionPercept.h.
|
|
Constructor.
Definition at line 9 of file CollisionPercept.cpp. |
|
|
Destructor.
Definition at line 26 of file CollisionPercept.cpp. |
|
|
Reset all states.
Definition at line 17 of file CollisionPercept.cpp. Referenced by GT2004CollisionDetector::execute(). |
|
|
Did collision occur at front left leg.
Definition at line 31 of file CollisionPercept.cpp. Referenced by GT2004RobotStateDetector::calculateCollisionState(), and getCollisionAggregate(). |
|
|
Did collision occur at front right leg.
Definition at line 39 of file CollisionPercept.cpp. Referenced by GT2004RobotStateDetector::calculateCollisionState(), and getCollisionAggregate(). |
|
|
Did collision occur at hind left leg.
Definition at line 47 of file CollisionPercept.cpp. Referenced by GT2004RobotStateDetector::calculateCollisionState(), and getCollisionAggregate(). |
|
|
Did collision occur at hind left leg.
Definition at line 56 of file CollisionPercept.cpp. Referenced by GT2004RobotStateDetector::calculateCollisionState(), and getCollisionAggregate(). |
|
|
Did collision occur at head.
Definition at line 66 of file CollisionPercept.cpp. Referenced by GT2004RobotStateDetector::calculateCollisionState(). |
|
|
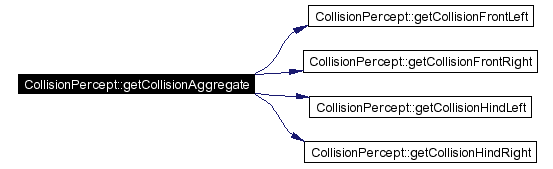
Did collision occur at any body part.
Definition at line 75 of file CollisionPercept.cpp. References getCollisionFrontLeft(), getCollisionFrontRight(), getCollisionHindLeft(), and getCollisionHindRight(). Referenced by GT2004RobotStateDetector::calculateCollisionState(). |
Here is the call graph for this function:
|
|
sets frame number
Definition at line 55 of file CollisionPercept.h. Referenced by GT2004CollisionDetector::execute(). |
|
|
Definition at line 31 of file CollisionPercept.h. Referenced by GT2004CollisionDetector::execute(). |
|
|
the last perceived frame
Definition at line 52 of file CollisionPercept.h. Referenced by operator<<(), operator>>(), GT2004RobotStateDetector::setCollisionOnLeftSide(), and GT2004RobotStateDetector::setCollisionOnRightSide(). |
 1.3.6
1.3.6