#include <PackageCognitionMotion.h>
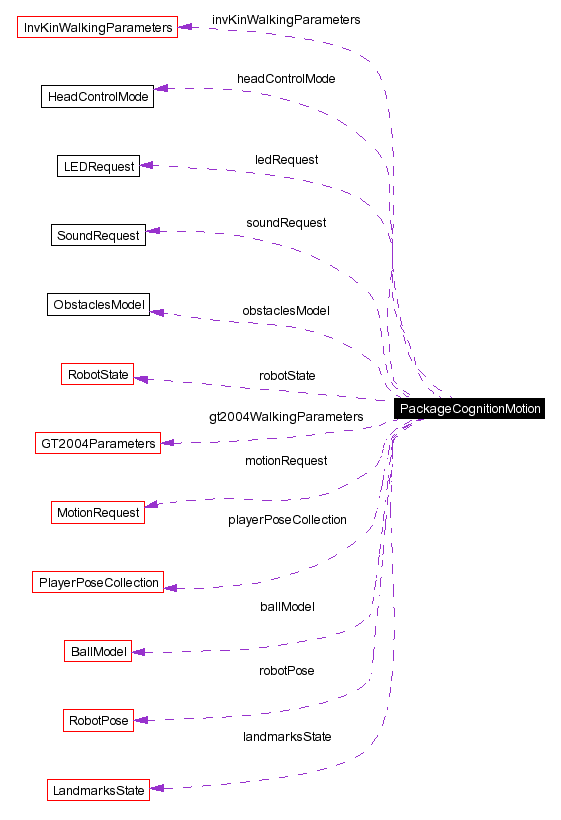
Collaboration diagram for PackageCognitionMotion:
Public Member Functions | |
| PackageCognitionMotion () | |
| Constructor. | |
Public Attributes | |
| LandmarksState | landmarksState |
| The seen landmarks. | |
| RobotPose | robotPose |
| The robots position and orientation. | |
| BallModel | ballModel |
| The position and the speed of the ball. | |
| PlayerPoseCollection | playerPoseCollection |
| The positions of the own and opponent players. | |
| ObstaclesModel | obstaclesModel |
| The positions of the obstacles. | |
| RobotState | robotState |
| Pressed switches and fall downs. | |
| MotionRequest | motionRequest |
| Motions requested by the behavior. | |
| HeadControlMode | headControlMode |
| The head control mode. | |
| LEDRequest | ledRequest |
| The ledRequest. | |
| SoundRequest | soundRequest |
| The SoundRequest. | |
| Player::teamColor | teamColor |
| An instance of the current player object. | |
| InvKinWalkingParameters | invKinWalkingParameters |
| walking parameter sets to be used by the WalkingEngine, eg calculated by evolution behavior | |
| GT2004Parameters | gt2004WalkingParameters |
| unsigned long | walkParameterTimeStamp |
| int | wLanStatus |
| The status of the WLan connection (one bit for every dog). | |
| unsigned long | timeStamp |
| The time when the package was sent. | |
Definition at line 36 of file PackageCognitionMotion.h.
|
|
Constructor.
Definition at line 11 of file PackageCognitionMotion.cpp. References getPlayer(), and gt2004WalkingParameters. |
Here is the call graph for this function:

|
|
The seen landmarks.
Definition at line 40 of file PackageCognitionMotion.h. Referenced by operator<<(), and operator>>(). |
|
|
The robots position and orientation.
Definition at line 43 of file PackageCognitionMotion.h. Referenced by operator<<(), and operator>>(). |
|
|
The position and the speed of the ball.
Definition at line 46 of file PackageCognitionMotion.h. Referenced by operator<<(), and operator>>(). |
|
|
The positions of the own and opponent players.
Definition at line 49 of file PackageCognitionMotion.h. Referenced by operator<<(), and operator>>(). |
|
|
The positions of the obstacles.
Definition at line 52 of file PackageCognitionMotion.h. |
|
|
Pressed switches and fall downs.
Definition at line 55 of file PackageCognitionMotion.h. Referenced by operator<<(), and operator>>(). |
|
|
Motions requested by the behavior.
Definition at line 58 of file PackageCognitionMotion.h. Referenced by operator<<(), and operator>>(). |
|
|
The head control mode.
Definition at line 61 of file PackageCognitionMotion.h. Referenced by operator<<(), and operator>>(). |
|
|
The ledRequest.
Definition at line 64 of file PackageCognitionMotion.h. Referenced by operator<<(), and operator>>(). |
|
|
The SoundRequest.
Definition at line 67 of file PackageCognitionMotion.h. Referenced by operator<<(), and operator>>(). |
|
|
An instance of the current player object.
Definition at line 70 of file PackageCognitionMotion.h. Referenced by operator<<(), and operator>>(). |
|
|
walking parameter sets to be used by the WalkingEngine, eg calculated by evolution behavior
Definition at line 73 of file PackageCognitionMotion.h. Referenced by operator<<(), and operator>>(). |
|
|
Definition at line 74 of file PackageCognitionMotion.h. Referenced by operator<<(), operator>>(), and PackageCognitionMotion(). |
|
|
Definition at line 75 of file PackageCognitionMotion.h. Referenced by operator<<(), and operator>>(). |
|
|
The status of the WLan connection (one bit for every dog).
Definition at line 78 of file PackageCognitionMotion.h. Referenced by operator<<(), and operator>>(). |
|
|
The time when the package was sent.
Definition at line 81 of file PackageCognitionMotion.h. Referenced by operator<<(), and operator>>(). |
 1.3.6
1.3.6