#include <MotionRequest.h>
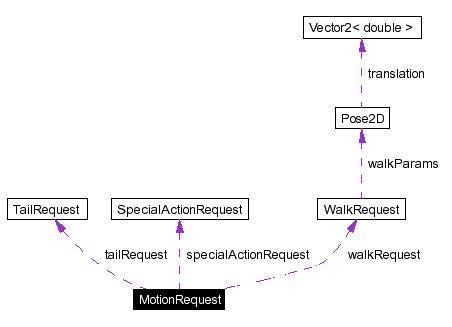
Collaboration diagram for MotionRequest:
Public Types | |
| enum | MotionID { stand, walk, specialAction, getup, playDead, numOfMotion } |
| ids for all motion types More... | |
Public Member Functions | |
| void | setFrameNumber (unsigned long frameNumber) |
| MotionRequest () | |
| constructor, startup motion defined here | |
| bool | operator== (const MotionRequest &other) const |
| == operator | |
| void | operator= (const MotionRequest &other) |
| = operator | |
| const char * | getMotionName () const |
| returns name of current motion | |
| const char * | getSpecialActionName () const |
| returns name of current special action if any | |
| const char * | getWalkTypeName () const |
| return name of current walking type if any | |
| void | printOut (char *destination) const |
| Prints the motion request to a readable string. | |
Static Public Member Functions | |
| const char * | getMotionName (MotionID id) |
| returns names for motion ids | |
Public Attributes | |
| unsigned long | frameNumber |
| MotionID | motionType |
| motion type | |
| SpecialActionRequest | specialActionRequest |
| SpecialActionRequest. | |
| TailRequest | tailRequest |
| WalkRequest | walkRequest |
| bool | stabilize |
| determines if the motion is being stabilized | |
| bool | updateRP |
| turns on or off the propagation (by odometry) of the "robot pose" in the "motion" process | |
| int | padding |
| Without this padding, the gcc-version crashes. | |
Definition at line 329 of file MotionRequest.h.
|
|
ids for all motion types
Definition at line 339 of file MotionRequest.h. |
|
|
constructor, startup motion defined here
Definition at line 381 of file MotionRequest.h. References motionType, playDead, stabilize, and updateRP. |
|
|
Definition at line 335 of file MotionRequest.h. |
|
|
returns names for motion ids
Definition at line 349 of file MotionRequest.h. References getup, playDead, specialAction, and walk. |
|
|
== operator
Definition at line 384 of file MotionRequest.h. References getup, motionType, specialAction, specialActionRequest, SpecialActionRequest::specialActionType, stabilize, walk, WalkRequest::walkParams, walkRequest, and WalkRequest::walkType. |
|
|
= operator
Definition at line 37 of file MotionRequest.cpp. |
|
|
returns name of current motion
Definition at line 418 of file MotionRequest.h. References motionType. Referenced by printOut(). |
|
|
returns name of current special action if any
Definition at line 421 of file MotionRequest.h. References SpecialActionRequest::getSpecialActionIDName(), motionType, specialAction, specialActionRequest, and SpecialActionRequest::specialActionType. Referenced by printOut(). |
Here is the call graph for this function:

|
|
return name of current walking type if any
Definition at line 430 of file MotionRequest.h. References WalkRequest::getWalkTypeName(), motionType, walk, walkRequest, and WalkRequest::walkType. Referenced by printOut(). |
Here is the call graph for this function:

|
|
Prints the motion request to a readable string. (E.g. "NormalWalk 100,0,0")
Definition at line 14 of file MotionRequest.cpp. References getMotionName(), getSpecialActionName(), getWalkTypeName(), motionType, Pose2D::rotation, specialAction, Pose2D::translation, walk, WalkRequest::walkParams, walkRequest, Vector2< double >::x, and Vector2< double >::y. Referenced by Xabsl2BehaviorControl::printGeneratedMainActionToString(). |
Here is the call graph for this function:

|
|
Definition at line 333 of file MotionRequest.h. |
|
|
|
|
Definition at line 369 of file MotionRequest.h. Referenced by ObstacleAvoiderOnGreenFieldERS7::execute(), ObstacleAvoiderOnGreenField::execute(), BB2004Calibrator::execute(), GT2004BehaviorControl::preExecute(), HeadAndTailSymbols::registerSymbols(), and GT2004MotionControl::wagTail(). |
|
|
|
determines if the motion is being stabilized
Definition at line 411 of file MotionRequest.h. Referenced by MotionRequest(), operator==(), and MotionStabilizer::stabilize(). |
|
|
turns on or off the propagation (by odometry) of the "robot pose" in the "motion" process
Definition at line 415 of file MotionRequest.h. Referenced by GT2004BasicBehaviorEvolveOmniParameters::execute(), and MotionRequest(). |
|
|
Without this padding, the gcc-version crashes.
Definition at line 444 of file MotionRequest.h. |
 1.3.6
1.3.6