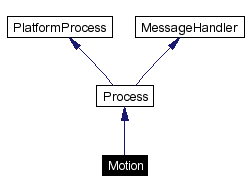
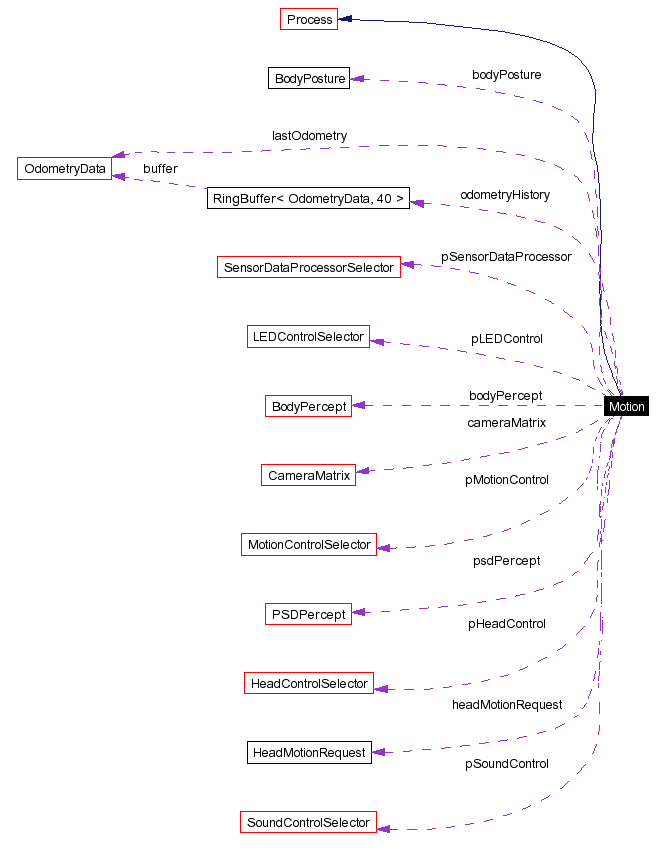
#include <Motion.h>
Inheritance diagram for Motion:
Public Member Functions | |
| Motion () | |
| ~Motion () | |
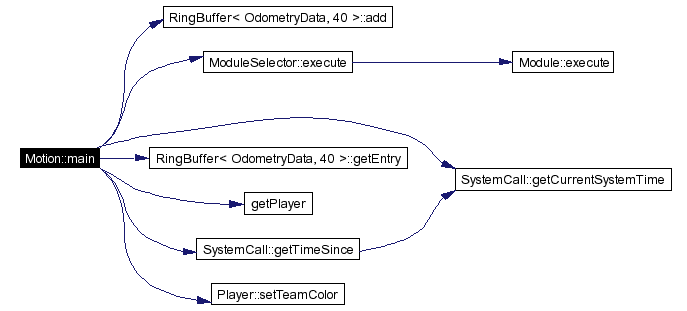
| virtual int | main () |
| is called from the framework once in every frame | |
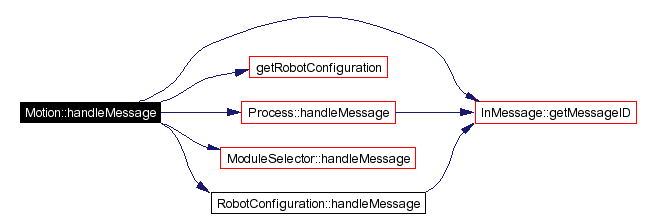
| virtual bool | handleMessage (InMessage &message) |
| The function handles incoming debug messages. | |
Protected Attributes | |
| unsigned long | frameNumber |
| unsigned int | motionControlExecuteSlowMotion |
| double | gameSpeed |
| Can be used to slow down the game for debugging purposes (slow motion). | |
| bool | headIsBlockedBySpecialActionOrWalk |
| Specifies if the head is blocked by a special action or walk. | |
modules | |
| SensorDataProcessorSelector * | pSensorDataProcessor |
| a reference to the sensor data processor | |
| HeadControlSelector * | pHeadControl |
| a pointer to the HeadControl module | |
| LEDControlSelector * | pLEDControl |
| a pointer to the LEDControl module | |
| MotionControlSelector * | pMotionControl |
| a pointer to the MotionControl module | |
| SoundControlSelector * | pSoundControl |
| a pointer to the SoundControl module | |
representations | |
| HeadMotionRequest | headMotionRequest |
| the head motion request | |
| CameraMatrix | cameraMatrix |
| The position and rotation of the camera relative to the robot. | |
| PSDPercept | psdPercept |
| The psd percept calculated by the sensor data processor. | |
| BodyPercept | bodyPercept |
| The body percept calculated by the sensor data processor. | |
| BodyPosture | bodyPosture |
| The height and the inclination of the robot's body. | |
| OdometryData | lastOdometry |
| The odometry which was calculated in the before last frame. | |
| unsigned long | lastFrameRobotPoseWasUpdated |
| Frame number in which robot pose was last updated. | |
| RingBuffer< OdometryData, 40 > | odometryHistory |
| Used to update robot pose. | |
Private Member Functions | |
| RECEIVER (SensorDataBuffer) | |
| RECEIVER (PackageCognitionMotion) | |
| SENDER (PackageMotionCognition) | |
| SENDER (OdometryData) | |
Private Attributes | |
| DEBUGGING | |
| SENDER_MOTORCOMMANDS | |
| SENDER_SOUNDDATA | |
Definition at line 27 of file Motion.h.
|
|
Definition at line 16 of file Motion.cpp. References Process::debugOut, INIT_DEBUGGING, INIT_RECEIVER, INIT_RECEIVER_SENSORDATA, INIT_SENDER, INIT_SENDER_MOTORCOMMANDS, INIT_SENDER_SOUNDDATA, pHeadControl, pLEDControl, pMotionControl, pSoundControl, and MessageQueue::setSize(). |
Here is the call graph for this function:

|
|
Definition at line 91 of file Motion.cpp. References pHeadControl, pLEDControl, pMotionControl, and pSoundControl. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
is called from the framework once in every frame
Implements Process. Definition at line 100 of file Motion.cpp. References RingBuffer< OdometryData, 40 >::add(), ModuleSelector::execute(), gameSpeed, SystemCall::getCurrentSystemTime(), RingBuffer< OdometryData, 40 >::getEntry(), getPlayer(), SystemCall::getTimeSince(), idBodyPosture, idJointData, idMotionInfo, idText, INFO, lastFrameRobotPoseWasUpdated, motionControlExecuteSlowMotion, odometryHistory, OUTPUT, pHeadControl, pLEDControl, pMotionControl, pSoundControl, Player::setTeamColor(), and STOP_TIME_ON_REQUEST. |
Here is the call graph for this function:
|
|
The function handles incoming debug messages.
Reimplemented from Process. Definition at line 194 of file Motion.cpp. References InMessage::bin, gameSpeed, InMessage::getMessageID(), getRobotConfiguration(), Process::handleMessage(), ModuleSelector::handleMessage(), RobotConfiguration::handleMessage(), idBodyOffsets, idGameSpeed, idHeadMotionRequest, idMotionControlSlowMotion, idOdometryData, idOdometryScale, idPIDData, idXabsl2DebugRequest, motionControlExecuteSlowMotion, pHeadControl, and pMotionControl. |
Here is the call graph for this function:
|
|
|
|
|
|
|
|
|
|
|
a reference to the sensor data processor
|
|
|
a pointer to the HeadControl module
Definition at line 62 of file Motion.h. Referenced by handleMessage(), main(), Motion(), and ~Motion(). |
|
|
a pointer to the LEDControl module
|
|
|
a pointer to the MotionControl module
Definition at line 68 of file Motion.h. Referenced by handleMessage(), main(), Motion(), and ~Motion(). |
|
|
a pointer to the SoundControl module
|
|
|
|
|
|
Definition at line 77 of file Motion.h. Referenced by handleMessage(), and main(). |
|
|
the head motion request
|
|
|
The position and rotation of the camera relative to the robot.
|
|
|
The psd percept calculated by the sensor data processor.
|
|
|
The body percept calculated by the sensor data processor.
|
|
|
The height and the inclination of the robot's body.
|
|
|
The odometry which was calculated in the before last frame.
|
|
|
Frame number in which robot pose was last updated.
Definition at line 101 of file Motion.h. Referenced by main(). |
|
|
Used to update robot pose.
Definition at line 104 of file Motion.h. Referenced by main(). |
|
|
Can be used to slow down the game for debugging purposes (slow motion). Is multiplied to the incoming MotionRequest and to the outgoing executedMotionRequest. 1: Normal speed -- 0.1: almost dont move Definition at line 112 of file Motion.h. Referenced by handleMessage(), and main(). |
|
|
Specifies if the head is blocked by a special action or walk.
|
 1.3.6
1.3.6