#include <CameraMatrix.h>
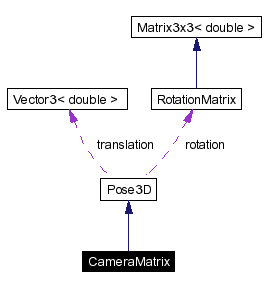
Inheritance diagram for CameraMatrix:
Public Member Functions | |
| CameraMatrix (const Pose3D pose) | |
| CameraMatrix () | |
| void | setFrameNumber (unsigned long frameNumber) |
Public Attributes | |
| unsigned long | frameNumber |
| The frame number when perceived. | |
| bool | isValid |
| Matrix is only valid if motion was stable. | |
Definition at line 16 of file CameraMatrix.h.
|
|
Definition at line 21 of file CameraMatrix.h. References isValid. |
|
|
Definition at line 22 of file CameraMatrix.h. References isValid. |
|
|
Definition at line 24 of file CameraMatrix.h. Referenced by GT2004SensorDataProcessor::buildCameraMatrix(). |
|
|
The frame number when perceived.
Definition at line 19 of file CameraMatrix.h. Referenced by GT2004ImageProcessor::execute(), GT2004BallLocator::execute(), Cognition::handleMessage(), GT2004BallLocator::handleSeenBall(), and Geometry::rayFromCamera(). |
|
|
Matrix is only valid if motion was stable.
Definition at line 26 of file CameraMatrix.h. Referenced by RBallSpecialist2::addBallPercept(), GT2004SensorDataProcessor::buildCameraMatrix(), GT2004SensorDataProcessor::buildPSDPercept(), CameraMatrix(), GT2004SelfLocator::execute(), RDefaultStrategy::init(), and GT2004ImageProcessor::scan(). |
 1.3.6
1.3.6