#include <WalkingEngine.h>
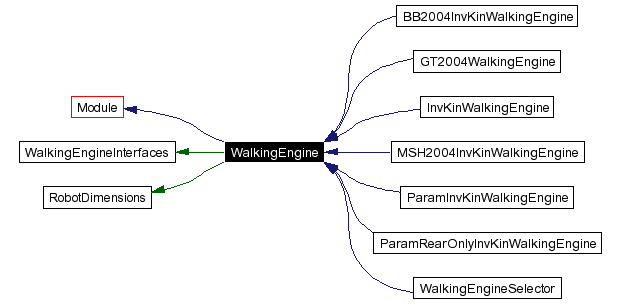
Inheritance diagram for WalkingEngine:
Public Member Functions | |
| WalkingEngine (const WalkingEngineInterfaces &interfaces) | |
| virtual bool | executeParameterized (JointData &jointData, const WalkRequest &walkRequest, double positionInWalkingCycle)=0 |
| Calculates the next joint data set. | |
| virtual | ~WalkingEngine () |
| Destructor. | |
Private Member Functions | |
| virtual void | execute () |
| That function is not used but has to be implemented. | |
It generates JointData and OdometryData according to current MotionRequest executing walking type motions.
Definition at line 83 of file WalkingEngine.h.
|
|
Definition at line 90 of file WalkingEngine.h. References getRobotConfiguration(). |
Here is the call graph for this function:

|
|
Destructor.
Definition at line 107 of file WalkingEngine.h. |
|
||||||||||||||||
|
Calculates the next joint data set.
Implemented in BB2004InvKinWalkingEngine, GT2004WalkingEngine, InvKinWalkingEngine, ParamInvKinWalkingEngine, ParamRearOnlyInvKinWalkingEngine, MSH2004InvKinWalkingEngine, and WalkingEngineSelector. Referenced by GT2004MotionControl::execute(). |
|
|
That function is not used but has to be implemented.
Implements Module. Definition at line 111 of file WalkingEngine.h. |
 1.3.6
1.3.6