#include <WalkingEngine.h>
Inheritance diagram for WalkingEngineInterfaces:
Public Member Functions | |
| WalkingEngineInterfaces (const SensorDataBuffer &sensorDataBuffer, const InvKinWalkingParameters &invKinWalkingParameters, const GT2004Parameters >2004Parameters, const unsigned long &walkParameterTimeStamp, const bool &receivedNewSensorData, const MotionRequest::MotionID &lastMotionType, PIDData &pidData, OdometryData &odometryData, MotionInfo &motionInfo) | |
| Constructor. | |
Protected Attributes | |
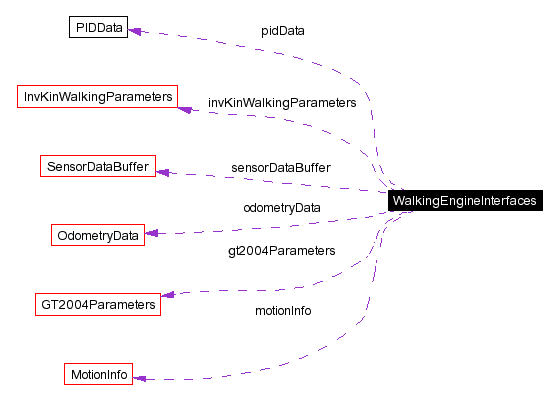
| const SensorDataBuffer & | sensorDataBuffer |
| The sensor data buffer containing all joint angles and others. | |
| const InvKinWalkingParameters & | invKinWalkingParameters |
| walking parameter sets to be used by the WalkingEngine, eg calculated by evolution behavior | |
| const GT2004Parameters & | gt2004Parameters |
| const unsigned long & | walkParameterTimeStamp |
| const bool & | receivedNewSensorData |
| Indicates that the Motion Process received a new SensorDataBuffer. | |
| const MotionRequest::MotionID & | lastMotionType |
| The motion type of the previous frame. | |
| PIDData & | pidData |
| The current PID servo gains. | |
| OdometryData & | odometryData |
| Has to be incremented by the walking engine. | |
| MotionInfo & | motionInfo |
| The neck height and the body tilt to be estimated by the walking engine. | |
Definition at line 27 of file WalkingEngine.h.
|
||||||||||||||||||||||||||||||||||||||||
|
Constructor.
Definition at line 31 of file WalkingEngine.h. |
|
|
The sensor data buffer containing all joint angles and others.
Definition at line 54 of file WalkingEngine.h. |
|
|
walking parameter sets to be used by the WalkingEngine, eg calculated by evolution behavior
Definition at line 57 of file WalkingEngine.h. |
|
|
Definition at line 58 of file WalkingEngine.h. |
|
|
Definition at line 59 of file WalkingEngine.h. |
|
|
Indicates that the Motion Process received a new SensorDataBuffer.
Definition at line 62 of file WalkingEngine.h. |
|
|
The motion type of the previous frame.
Definition at line 65 of file WalkingEngine.h. |
|
|
The current PID servo gains.
Definition at line 68 of file WalkingEngine.h. |
|
|
Has to be incremented by the walking engine.
Definition at line 71 of file WalkingEngine.h. |
|
|
The neck height and the body tilt to be estimated by the walking engine.
Definition at line 74 of file WalkingEngine.h. |
 1.3.6
1.3.6