#include <MotionInfo.h>
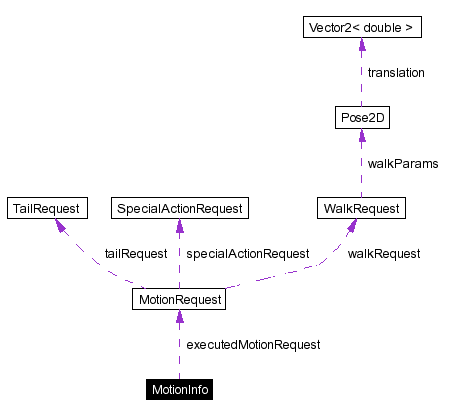
Collaboration diagram for MotionInfo:
Public Member Functions | |
| MotionInfo () | |
| Constructor. | |
Public Attributes | |
| MotionRequest | executedMotionRequest |
| The motion request which is executed by the MotionControl module. | |
| bool | motionIsStable |
| If true, the motion is stable, leading to a valid camera matrix. | |
| double | neckHeight |
| The height of the neck joint in mm as estimated by the motion modules. | |
| double | bodyTilt |
| The tilt of the body in rad. | |
| double | positionInWalkCycle |
| The position inside the step of the walking engine slides from 0 to 1 during one step. | |
Definition at line 22 of file MotionInfo.h.
|
|
Constructor.
Definition at line 12 of file MotionInfo.cpp. |
|
|
The motion request which is executed by the MotionControl module.
Definition at line 29 of file MotionInfo.h. Referenced by GT2004MotionControl::execute(), GT2004CollisionDetector::execute(), KickLogger::execute(), InvKinWalkingEngine::executeParameterized(), GT2004WalkingEngine::executeParameterized(), GT2004GetupEngine::executeParameterized(), MotionRequestSymbols::getExecutedSpecialActionType(), GT2003MotionNetSpecialActions::getNextData(), GT2004BehaviorControl::postExecute(), and MotionRequestSymbols::registerSymbols(). |
|
|
If true, the motion is stable, leading to a valid camera matrix.
Definition at line 32 of file MotionInfo.h. Referenced by GT2004SensorDataProcessor::buildCameraMatrix(), GT2004SensorDataProcessor::execute(), InvKinWalkingEngine::executeParameterized(), GT2004WalkingEngine::executeParameterized(), GT2004GetupEngine::executeParameterized(), and GT2003MotionNetSpecialActions::getNextData(). |
|
|
The height of the neck joint in mm as estimated by the motion modules.
Definition at line 35 of file MotionInfo.h. Referenced by GT2004SensorDataProcessor::execute(), InvKinWalkingEngine::executeParameterized(), GT2004WalkingEngine::executeParameterized(), GT2004GetupEngine::executeParameterized(), GT2003MotionNetSpecialActions::getNextData(), and GT2003MotionNetSpecialActions::readOdometryTable(). |
|
|
The tilt of the body in rad.
Definition at line 38 of file MotionInfo.h. Referenced by GT2004SensorDataProcessor::execute(), InvKinWalkingEngine::executeParameterized(), GT2004WalkingEngine::executeParameterized(), and GT2003MotionNetSpecialActions::getNextData(). |
|
|
The position inside the step of the walking engine slides from 0 to 1 during one step.
Definition at line 44 of file MotionInfo.h. Referenced by GT2004MotionControl::execute(), InvKinWalkingEngine::executeParameterized(), GT2004WalkingEngine::executeParameterized(), GT2004HeadControlSymbols::getPositionInWalkCycle(), MotionRequestSymbols::getPositionInWalkCycle(), GT2004HeadControlSymbols::getReleasingBallLeftIsPossible(), and GT2004HeadControlSymbols::getReleasingBallRightIsPossible(). |
 1.3.6
1.3.6