#include <InvKinWalkingEngine.h>
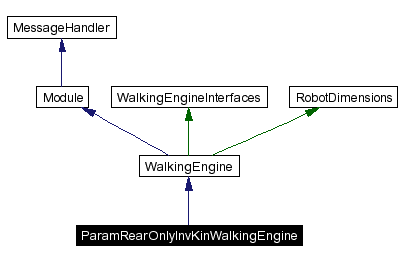
Inheritance diagram for ParamRearOnlyInvKinWalkingEngine:
Public Member Functions | |
| ParamRearOnlyInvKinWalkingEngine (InvKinWalkingParameters *pParams, InvKinWalkingEngine *pEngine) | |
| ~ParamRearOnlyInvKinWalkingEngine () | |
| virtual bool | executeParameterized (JointData &jointData, const WalkRequest &walkRequest, double positionInWalkingCycle) |
| Calculates the next joint data set. | |
| bool | handleMessage (InMessage &message) |
| Called from a MessageQueue to distribute messages. | |
Public Attributes | |
| InvKinWalkingEngine * | pEngine |
| InvKinWalkingParameters * | pParams |
Only the hind legs are moved, every other joints are left in their current positions.
Definition at line 216 of file InvKinWalkingEngine.h.
|
||||||||||||
|
Definition at line 219 of file InvKinWalkingEngine.h. |
|
|
Definition at line 228 of file InvKinWalkingEngine.h. |
|
||||||||||||||||
|
Calculates the next joint data set.
Implements WalkingEngine. Definition at line 236 of file InvKinWalkingEngine.h. References JointData::data, InvKinWalkingEngine::executeParameterized(), and InvKinWalkingEngine::setParameters(). |
Here is the call graph for this function:

|
|
Called from a MessageQueue to distribute messages. Use message.getMessageID to decide if the message is relavant for the MesssageHandler derivate. Use message.bin, message.text or message.config as In streams to get the data from.
Reimplemented from Module. Definition at line 257 of file InvKinWalkingEngine.h. References InMessage::bin, InMessage::getMessageID(), InvKinWalkingEngine::handleMessage(), and idInvKinWalkingParameters. |
Here is the call graph for this function:

|
|
Definition at line 233 of file InvKinWalkingEngine.h. |
|
|
Definition at line 234 of file InvKinWalkingEngine.h. |
 1.3.6
1.3.6