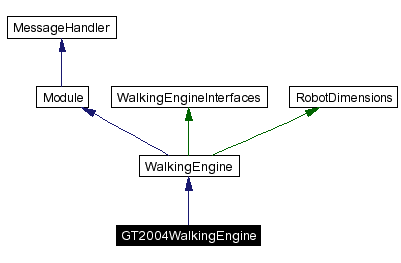
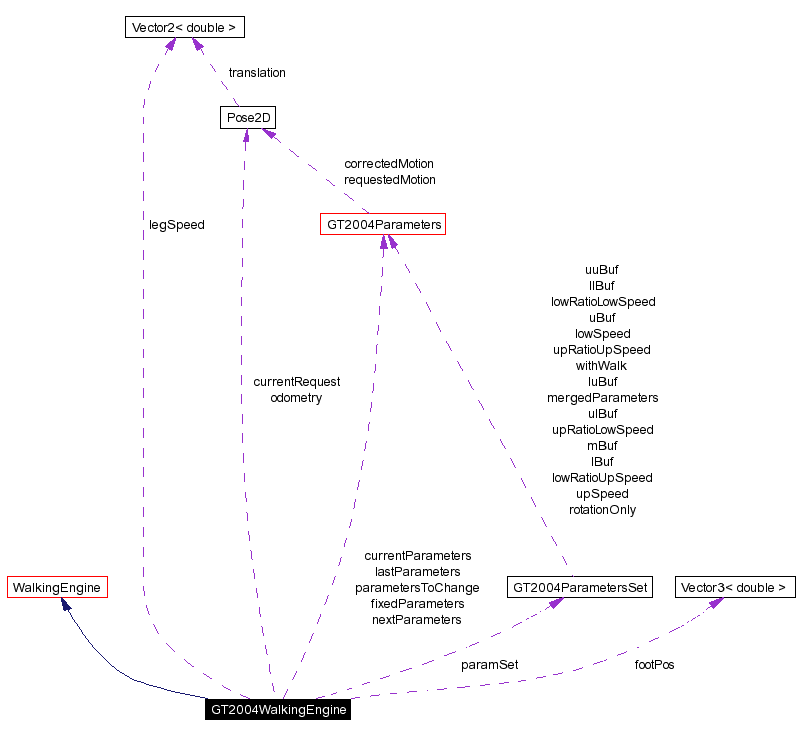
#include <GT2004WalkingEngine.h>
Inheritance diagram for GT2004WalkingEngine:
parameter set interpolation | |
| void | initParametersInterpolation (int changeSteps) |
| Initialize interpolation of WalkingParameterSets. | |
| void | nextParametersInterpolation (bool walk) |
| Calculate next step in parameterset interpolation and increase currentStep if walk is true. | |
| GT2004Parameters * | currentParameters |
| Points to parameter set currently in use. | |
| GT2004Parameters | fixedParameters |
| Fixed parameter set for InvKin compatibility. | |
| GT2004Parameters * | parametersToChange |
| Pointer to the parameter set that shall be changed by interpolation. | |
| GT2004Parameters | nextParameters |
| Next parameters of this walk, target of current interpolation. | |
| GT2004Parameters | lastParameters |
| Last parameters of this walk, origin of current interpolation. | |
| int | paramInterpolCount |
| Counts parameter set interpolation steps. | |
| int | paramInterpolLength |
| Stores the length of the current parameter set interpolation. | |
| double | currentStepPercentage |
| Stores precise version of currentStep for all kinds of interpolation. | |
Public Member Functions | |
| GT2004WalkingEngine (const WalkingEngineInterfaces &interfaces) | |
| Constructor. | |
| ~GT2004WalkingEngine () | |
| Destructor. | |
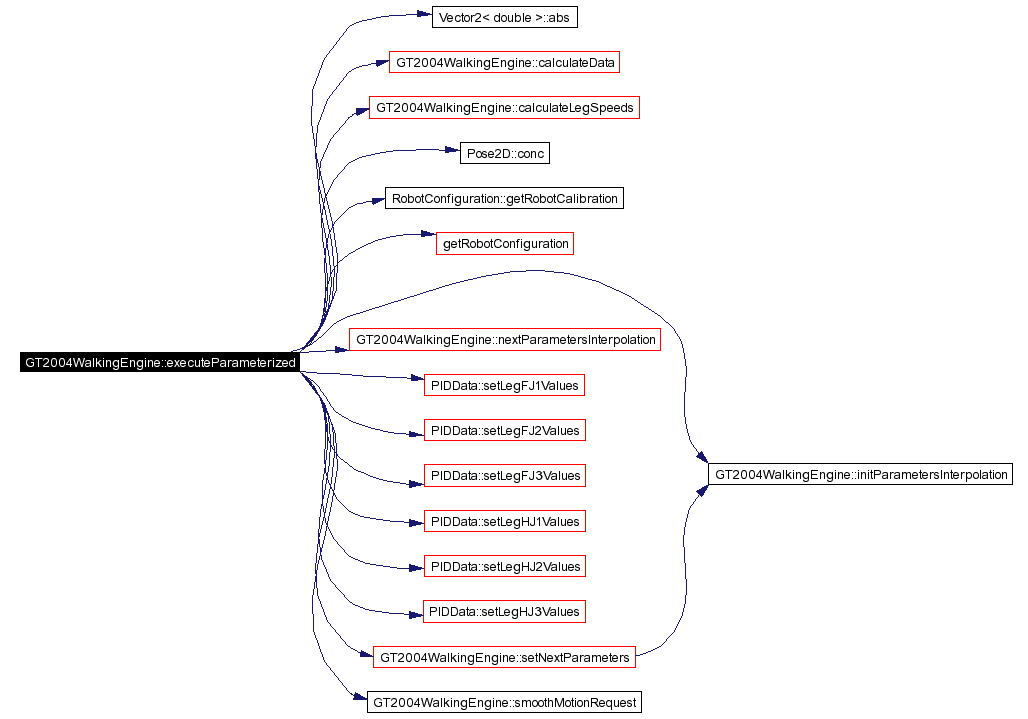
| virtual bool | executeParameterized (JointData &jointData, const WalkRequest &walkRequest, double positionInWalkingCycle) |
| Executes the engine. | |
| virtual bool | handleMessage (InMessage &message) |
| Called from a MessageQueue to distribute messages. | |
| void | setNextParameters (int steps) |
| find correct table entry to update (in turnOnly and withWalk): find the entry most similar to nextParameters, copy the old value to lastParameters, set parametersToChange and start interpolation | |
Private Member Functions | |
| void | init () |
| initialise fixed parameters | |
| void | calculateParams () |
| calculate all engine wide parameters like neckHeight from currentParameters this is essential after every change in currentParameters! | |
| void | smoothMotionRequest (const Pose2D &request, Pose2D ¤tRequest) |
| smooth motion request current request is adjusted according to motion request eliminating quick changes | |
| void | calculateLegSpeeds () |
| calculates new leg speeds according to current motion request | |
| void | calculateRelativeFootPosition (int step, int leg, double &rx, double &ry, double &rz) |
| calculate relative foot position for one leg rx is relative to current step size (range -1.0..1.0) ry is an absolute offset to y foot position rz is relative to step lift parameter (range 0..1.0) | |
| int | calculateLegJoints (Kinematics::LegIndex leg, double &j1, double &j2, double &j3, double bodyTilt=0) |
| calculate angles for one leg in current step | |
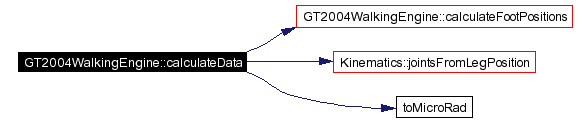
| void | calculateData (JointData &j) |
| calculate current joint data values | |
| void | calculateFootPositions () |
| calculate current foot positions | |
Private Attributes | |
| GT2004ParametersSet | paramSet |
| a set of GT2004Parameters optimized for different requests | |
| bool | useFixedParameters |
| decides whether we use merging of rotationOnly and withWalk or fixedParameters | |
| bool | recalcEngineParameters |
| true if stuff like legSpeed has to be recalculated because of changed request or parameterset | |
| unsigned long | lastParametersFromPackageTimeStamp |
| double | neckHeight |
| neck height in mm while walking | |
| double | bodyTilt |
| body tilt angle | |
| Pose2D | currentRequest |
| currently executed motion request speeds in mm/s | |
| Pose2D | odometry |
| odometry resulting from current request speed in mm/tick | |
fixed gait parameters resulting from merged parameter set | |
| int | groundTime [2] |
| number of ticks foot is on ground | |
| int | liftTime [2] |
| number of ticks for lifting foot | |
| int | loweringTime [2] |
| number of ticks for lowering foot | |
| int | airTime [2] |
| number of ticks foot is in air | |
| int | stepLift [2] |
| time index for lifting foot | |
| int | stepAir [2] |
| time index when foot is fully lifted | |
| int | stepLower [2] |
| time index for lowering foot | |
| int | legPhaseIndex [4] |
| leg phases, time indexes for lifting each leg | |
| int | firstStep |
| time index for first time all feet are on ground | |
current walk values | |
| Vector2< double > | legSpeed [4] |
| speed of leg on ground (step size in mm) | |
| Vector3< double > | footPos [4] |
| foot positions | |
Definition at line 28 of file GT2004WalkingEngine.h.
|
|
Constructor.
Definition at line 17 of file GT2004WalkingEngine.cpp. References init(). |
Here is the call graph for this function:

|
|
Destructor.
Definition at line 27 of file GT2004WalkingEngine.cpp. |
|
||||||||||||||||
Here is the call graph for this function:
|
|
Called from a MessageQueue to distribute messages.
Reimplemented from Module. Definition at line 573 of file GT2004WalkingEngine.cpp. References InMessage::bin, fixedParameters, InMessage::getMessageID(), idGT2004EvolutionRequest, idGT2004Parameters, idInvKinWalkingParameters, idText, GT2004Parameters::index, initParametersInterpolation(), lastParameters, GT2004ParametersSet::load(), GT2004ParametersSet::mergedParameters, nextParameters, OUTPUT, parametersToChange, paramInterpolCount, paramInterpolLength, paramSet, recalcEngineParameters, setNextParameters(), and useFixedParameters. |
Here is the call graph for this function:

|
|
find correct table entry to update (in turnOnly and withWalk): find the entry most similar to nextParameters, copy the old value to lastParameters, set parametersToChange and start interpolation
Definition at line 66 of file GT2004WalkingEngine.cpp. References GT2004ParametersSet::getParameters(), GT2004Parameters::index, initParametersInterpolation(), lastParameters, nextParameters, parametersToChange, and paramSet. Referenced by executeParameterized(), and handleMessage(). |
Here is the call graph for this function:

|
|
Initialize interpolation of WalkingParameterSets.
Definition at line 634 of file GT2004WalkingEngine.cpp. References nextParameters, parametersToChange, paramInterpolCount, paramInterpolLength, and recalcEngineParameters. Referenced by executeParameterized(), handleMessage(), and setNextParameters(). |
|
|
Calculate next step in parameterset interpolation and increase currentStep if walk is true.
Definition at line 645 of file GT2004WalkingEngine.cpp. References currentStepPercentage, GT2004Parameters::index, GT2004Parameters::interpolate(), lastParameters, GT2004ParametersSet::mirrorThis(), nextParameters, parametersToChange, paramInterpolCount, paramInterpolLength, paramSet, recalcEngineParameters, and GT2004Parameters::stepLen. Referenced by executeParameterized(). |
Here is the call graph for this function:

|
|
initialise fixed parameters
Definition at line 31 of file GT2004WalkingEngine.cpp. References calculateParams(), GT2004ParametersSet::mergedParameters, and paramSet. Referenced by GT2004WalkingEngine(). |
Here is the call graph for this function:

|
|
calculate all engine wide parameters like neckHeight from currentParameters this is essential after every change in currentParameters!
Definition at line 37 of file GT2004WalkingEngine.cpp. References airTime, GT2004Parameters::foreHeight, GT2004Parameters::groundPhase, groundTime, GT2004Parameters::hindHeight, GT2004Parameters::legPhase, legPhaseIndex, GT2004Parameters::liftPhase, liftTime, GT2004Parameters::loweringPhase, loweringTime, stepAir, GT2004Parameters::stepLen, stepLift, and stepLower. Referenced by calculateLegSpeeds(), and init(). |
|
||||||||||||
|
smooth motion request current request is adjusted according to motion request eliminating quick changes
Definition at line 73 of file GT2004WalkingEngine.cpp. References Pose2D::rotation, Pose2D::translation, Vector2< double >::x, and Vector2< double >::y. Referenced by executeParameterized(). |
|
|
calculates new leg speeds according to current motion request
Definition at line 99 of file GT2004WalkingEngine.cpp. References GT2004ParametersSet::calculateMergedParameterSet(), calculateParams(), GT2004Parameters::correctedMotion, currentRequest, GT2004Parameters::foreCenterX, GT2004Parameters::foreWidth, GT2004Parameters::hindCenterX, GT2004Parameters::hindWidth, legSpeed, GT2004ParametersSet::mergedParameters, paramSet, recalcEngineParameters, GT2004Parameters::requestedMotion, Pose2D::rotation, GT2004Parameters::stepLen, Pose2D::translation, useFixedParameters, Vector2< double >::x, and Vector2< double >::y. Referenced by executeParameterized(). |
Here is the call graph for this function:

|
||||||||||||||||||||||||
|
calculate relative foot position for one leg rx is relative to current step size (range -1.0..1.0) ry is an absolute offset to y foot position rz is relative to step lift parameter (range 0..1.0)
Definition at line 193 of file GT2004WalkingEngine.cpp. References airTime, GT2004Parameters::footMode, FORELEG, groundTime, liftTime, loweringTime, pi, stepAir, GT2004Parameters::stepLen, stepLift, and stepLower. Referenced by calculateFootPositions(). |
|
||||||||||||||||||||||||
|
calculate angles for one leg in current step
|
|
|
calculate current joint data values
Definition at line 539 of file GT2004WalkingEngine.cpp. References calculateFootPositions(), JointData::data, footPos, GT2004Parameters::headPan, GT2004Parameters::headRoll, GT2004Parameters::headTilt, Kinematics::jointsFromLegPosition(), GT2004Parameters::mouth, and toMicroRad(). Referenced by executeParameterized(). |
Here is the call graph for this function:
|
|
calculate current foot positions
Definition at line 378 of file GT2004WalkingEngine.cpp. References Vector2< double >::abs(), calculateRelativeFootPosition(), currentStepPercentage, footPos, GT2004Parameters::foreCenterX, GT2004Parameters::foreFootLift, GT2004Parameters::foreFootTilt, GT2004Parameters::foreHeight, FORELEG, GT2004Parameters::foreWidth, GT2004Parameters::hindCenterX, GT2004Parameters::hindFootLift, GT2004Parameters::hindFootTilt, GT2004Parameters::hindHeight, GT2004Parameters::hindWidth, LEFTLEG, legPhaseIndex, legSpeed, GT2004Parameters::stepLen, Vector2< double >::x, Vector3< double >::x, Vector3< double >::y, and Vector3< double >::z. Referenced by calculateData(). |
Here is the call graph for this function:

|
|
a set of GT2004Parameters optimized for different requests
Definition at line 63 of file GT2004WalkingEngine.h. Referenced by calculateLegSpeeds(), executeParameterized(), handleMessage(), init(), nextParametersInterpolation(), and setNextParameters(). |
|
|
Points to parameter set currently in use.
Definition at line 68 of file GT2004WalkingEngine.h. |
|
|
Fixed parameter set for InvKin compatibility.
Definition at line 71 of file GT2004WalkingEngine.h. Referenced by executeParameterized(), and handleMessage(). |
|
|
Pointer to the parameter set that shall be changed by interpolation.
Definition at line 74 of file GT2004WalkingEngine.h. Referenced by executeParameterized(), handleMessage(), initParametersInterpolation(), nextParametersInterpolation(), and setNextParameters(). |
|
|
Next parameters of this walk, target of current interpolation.
Definition at line 77 of file GT2004WalkingEngine.h. Referenced by executeParameterized(), handleMessage(), initParametersInterpolation(), nextParametersInterpolation(), and setNextParameters(). |
|
|
Last parameters of this walk, origin of current interpolation.
Definition at line 80 of file GT2004WalkingEngine.h. Referenced by executeParameterized(), handleMessage(), nextParametersInterpolation(), and setNextParameters(). |
|
|
Counts parameter set interpolation steps.
Definition at line 83 of file GT2004WalkingEngine.h. Referenced by executeParameterized(), handleMessage(), initParametersInterpolation(), and nextParametersInterpolation(). |
|
|
Stores the length of the current parameter set interpolation.
Definition at line 86 of file GT2004WalkingEngine.h. Referenced by executeParameterized(), handleMessage(), initParametersInterpolation(), and nextParametersInterpolation(). |
|
|
Stores precise version of currentStep for all kinds of interpolation.
Definition at line 89 of file GT2004WalkingEngine.h. Referenced by calculateFootPositions(), executeParameterized(), and nextParametersInterpolation(). |
|
|
number of ticks foot is on ground
Definition at line 100 of file GT2004WalkingEngine.h. Referenced by calculateParams(), and calculateRelativeFootPosition(). |
|
|
number of ticks for lifting foot
Definition at line 101 of file GT2004WalkingEngine.h. Referenced by calculateParams(), and calculateRelativeFootPosition(). |
|
|
number of ticks for lowering foot
Definition at line 102 of file GT2004WalkingEngine.h. Referenced by calculateParams(), and calculateRelativeFootPosition(). |
|
|
number of ticks foot is in air
Definition at line 103 of file GT2004WalkingEngine.h. Referenced by calculateParams(), and calculateRelativeFootPosition(). |
|
|
time index for lifting foot
Definition at line 104 of file GT2004WalkingEngine.h. Referenced by calculateParams(), and calculateRelativeFootPosition(). |
|
|
time index when foot is fully lifted
Definition at line 105 of file GT2004WalkingEngine.h. Referenced by calculateParams(), and calculateRelativeFootPosition(). |
|
|
time index for lowering foot
Definition at line 106 of file GT2004WalkingEngine.h. Referenced by calculateParams(), and calculateRelativeFootPosition(). |
|
|
leg phases, time indexes for lifting each leg
Definition at line 107 of file GT2004WalkingEngine.h. Referenced by calculateFootPositions(), and calculateParams(). |
|
|
time index for first time all feet are on ground
Definition at line 108 of file GT2004WalkingEngine.h. |
|
|
decides whether we use merging of rotationOnly and withWalk or fixedParameters
Definition at line 112 of file GT2004WalkingEngine.h. Referenced by calculateLegSpeeds(), executeParameterized(), and handleMessage(). |
|
|
true if stuff like legSpeed has to be recalculated because of changed request or parameterset
Definition at line 115 of file GT2004WalkingEngine.h. Referenced by calculateLegSpeeds(), executeParameterized(), handleMessage(), initParametersInterpolation(), and nextParametersInterpolation(). |
|
|
Definition at line 117 of file GT2004WalkingEngine.h. Referenced by executeParameterized(). |
|
|
neck height in mm while walking
Definition at line 120 of file GT2004WalkingEngine.h. |
|
|
body tilt angle
Definition at line 123 of file GT2004WalkingEngine.h. |
|
|
speed of leg on ground (step size in mm)
Definition at line 127 of file GT2004WalkingEngine.h. Referenced by calculateFootPositions(), and calculateLegSpeeds(). |
|
|
foot positions
Definition at line 129 of file GT2004WalkingEngine.h. Referenced by calculateData(), and calculateFootPositions(). |
|
|
currently executed motion request speeds in mm/s
Definition at line 135 of file GT2004WalkingEngine.h. Referenced by calculateLegSpeeds(), and executeParameterized(). |
|
|
odometry resulting from current request speed in mm/tick
Definition at line 140 of file GT2004WalkingEngine.h. |
 1.3.6
1.3.6