#include <Pose2D.h>
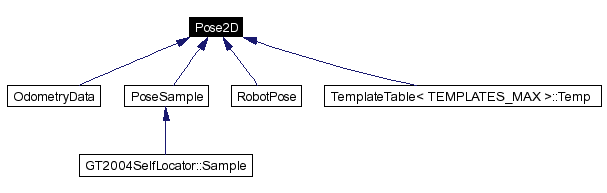
Inheritance diagram for Pose2D:
Public Member Functions | |
| Pose2D () | |
| noargs-constructor | |
| Pose2D (const double rot, const Vector2< double > &trans) | |
| constructor from rotation and translation | |
| Pose2D (const double rot, const double x, const double y) | |
| constructor from rotation and translation | |
| Pose2D (const double rot) | |
| constructor from rotation | |
| Pose2D (const Vector2< double > &trans) | |
| constructor from translation | |
| Pose2D (const Vector2< int > &trans) | |
| constructor from translation | |
| Pose2D (const double x, const double y) | |
| constructor from two translation values | |
| double | getAngle () const |
| get the Angle | |
| Pose2D | fromAngle (const double a) |
| set rotation from Angle | |
| double | getCos () const |
| get the cos of the angle | |
| double | getSin () const |
| get the sin of the angle | |
| Pose2D & | operator= (const Pose2D &other) |
| Assignment operator. | |
| Pose2D (const Pose2D &other) | |
| Copy constructor. | |
| Vector2< double > | operator * (const Vector2< double > &point) const |
| Multiplication of a Vector2 with this Pose2D. | |
| bool | operator== (const Pose2D &other) const |
| Comparison of another pose with this one. | |
| bool | operator!= (const Pose2D &other) const |
| Comparison of another pose with this one. | |
| Pose2D & | operator+= (const Pose2D &other) |
| Concatenation of this pose with another pose. | |
| Pose2D | operator+ (const Pose2D &other) const |
| A concatenation of this pose and another pose. | |
| Pose2D | minusDiff (const Pose2D &diff) const |
| Subtracts a difference pose from this one to get the source pose. | |
| Pose2D & | operator-= (const Pose2D &other) |
| Difference of this pose relative to another pose. | |
| Pose2D | operator- (const Pose2D &other) const |
| Difference of this pose relative to another pose. | |
| Pose2D & | conc (const Pose2D &other) |
| Concatenation of this pose with another pose. | |
| Pose2D & | translate (const Vector2< double > &trans) |
| Translate this pose by a translation vector. | |
| Pose2D & | translate (const double x, const double y) |
| Translate this pose by a translation vector. | |
| Pose2D & | rotate (const double angle) |
| Rotate this pose by a rotation. | |
Static Public Member Functions | |
| Pose2D | random (const Range< double > &x, const Range< double > &y, const Range< double > &angle) |
| The function creates a random pose. | |
Public Attributes | |
| double | rotation |
| Rotation as an angle. | |
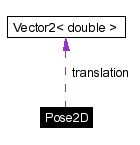
| Vector2< double > | translation |
| translation as an vector2 | |
Definition at line 23 of file Pose2D.h.
|
|
noargs-constructor
Definition at line 33 of file Pose2D.h. References rotation, and translation. Referenced by minusDiff(), operator+(), operator-(), and random(). |
|
||||||||||||
|
constructor from rotation and translation
Definition at line 40 of file Pose2D.h. References rotation, and translation. |
|
||||||||||||||||
|
constructor from rotation and translation
Definition at line 47 of file Pose2D.h. References rotation, and translation. |
|
|
constructor from rotation
Definition at line 54 of file Pose2D.h. References rotation, and translation. |
|
|
constructor from translation
Definition at line 60 of file Pose2D.h. References rotation, and translation. |
|
|
constructor from translation
Definition at line 66 of file Pose2D.h. References rotation, and translation. |
|
||||||||||||
|
constructor from two translation values
Definition at line 72 of file Pose2D.h. References rotation, and translation. |
|
|
Copy constructor.
|
|
|
get the Angle
Definition at line 77 of file Pose2D.h. References rotation. Referenced by KalmanConstantSpeedModel::adapt(), GT2004SelfLocator::calcPose(), AngleSymbols::calculateCombinedAngles(), GT2004ObstaclesLocator::determineFreePartsOfGoals(), AngleSymbols::drawAngleShownByLeds(), ChallengeSpecialVision::executeFindOrientation(), ChallengeSpecialVision::executeLearnOrientation(), GT2004ConfigurationSymbols::getOwnKickoffAngleByObstacles(), GT2004SelfLocator::getTemplate(), GT2004HeadControl::simpleLookAtPointOnField(), InvKinWalkingEngine::smoothMotionRequest(), GT2004ConfigurationSymbols::update(), GT2004SelfLocator::updateByOdometry(), and GT2004SelfLocator::updateByPoint(). |
|
|
set rotation from Angle
Definition at line 83 of file Pose2D.h. References rotation. Referenced by GT2004ConfigurationSymbols::update(). |
|
|
get the cos of the angle
Definition at line 88 of file Pose2D.h. References rotation. Referenced by GT2004SelfLocator::calcPose(). |
|
|
get the sin of the angle
Definition at line 93 of file Pose2D.h. References rotation. Referenced by GT2004SelfLocator::calcPose(). |
|
|
Assignment operator.
Reimplemented in RobotPose. Definition at line 99 of file Pose2D.h. References rotation, and translation. |
|
|
Multiplication of a Vector2 with this Pose2D.
Definition at line 116 of file Pose2D.h. References point, rotation, translation, Vector2< int >::x, and Vector2< int >::y. |
|
|
Comparison of another pose with this one.
Definition at line 127 of file Pose2D.h. References rotation, and translation. |
|
|
Comparison of another pose with this one.
|
|
|
Concatenation of this pose with another pose.
Definition at line 143 of file Pose2D.h. References normalize(), rotation, and translation. |
Here is the call graph for this function:

|
|
A concatenation of this pose and another pose.
Definition at line 155 of file Pose2D.h. References Pose2D(). |
Here is the call graph for this function:

|
|
Subtracts a difference pose from this one to get the source pose. So if A+B=C is the addition/concatenation, this calculates C-B=A.
Definition at line 162 of file Pose2D.h. References Pose2D(), rotation, translation, Vector2< double >::x, and Vector2< double >::y. Referenced by KickLogger::execute(), and Parcour::getMotionRequest(). |
Here is the call graph for this function:

|
|
Difference of this pose relative to another pose. So if A+B=C is the addition/concatenation, this calculates C-A=B.
Definition at line 177 of file Pose2D.h. References rotation, and translation. |
|
|
Difference of this pose relative to another pose.
Definition at line 188 of file Pose2D.h. References Pose2D(). |
Here is the call graph for this function:

|
|
Concatenation of this pose with another pose.
Definition at line 195 of file Pose2D.h. Referenced by InvKinWalkingEngine::executeParameterized(), GT2004WalkingEngine::executeParameterized(), and GT2003MotionNetSpecialActions::executeParameterized(). |
|
|
Translate this pose by a translation vector.
Definition at line 202 of file Pose2D.h. References translation. |
|
||||||||||||
|
Translate this pose by a translation vector.
Definition at line 213 of file Pose2D.h. References translation. |
|
|
Rotate this pose by a rotation.
Definition at line 224 of file Pose2D.h. References rotation. |
|
||||||||||||||||
|
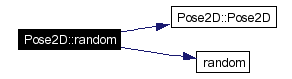
The function creates a random pose.
Definition at line 236 of file Pose2D.h. References Range< T >::max, Range< T >::min, Pose2D(), and random(). Referenced by GT2004SelfLocator::getTemplate(), and Field::randomPose(). |
Here is the call graph for this function:
|
|
 1.3.6
1.3.6