#include <PlayerPoseCollection.h>
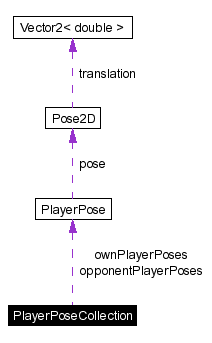
Collaboration diagram for PlayerPoseCollection:
Public Member Functions | |
| PlayerPoseCollection () | |
| Constructor. | |
| PlayerPoseCollection (PlayerPoseCollection &other) | |
| Copy-Constructor. | |
| ~PlayerPoseCollection () | |
| Destructor. | |
| void | setOwnPlayerPose (int index, const PlayerPose &pose) |
| sets a player pose of the own team at a given index | |
| void | setOwnPlayerPose (int index, const double &x, const double &y, const double &rotation) |
| sets a player pose of the own team at a given index | |
| void | setOwnPlayerPose (int index, const double &x, const double &y, const double &rotation, const double &validity) |
| sets a player pose of the own team at a given index | |
| const PlayerPose & | getOwnPlayerPose (int index) const |
| returns a player pose of the own team for a given index | |
| void | setOpponentPlayerPose (int index, const PlayerPose &pose) |
| sets a player pose of the opponent team at a given index | |
| void | setOpponentPlayerPose (int index, const double &x, const double &y, const double &rotation) |
| sets a player pose of the opponent team at a given index | |
| void | setOpponentPlayerPose (int index, const double &x, const double &y, const double &rotation, const double &validity) |
| sets a player pose of the opponent team at a given index | |
| const PlayerPose & | getOpponentPlayerPose (int index) const |
| returns a player pose of the opponent team for a given index | |
| void | operator= (const PlayerPoseCollection &other) |
| copies another PlayerPoseCollection to this one | |
Public Attributes | |
| int | numberOfOpponentPlayers |
| Number of located opponent robots. | |
| int | numberOfOwnPlayers |
| Number of located own robots. | |
Protected Attributes | |
| PlayerPose | opponentPlayerPoses [4] |
| A list of located opponent robots. | |
| PlayerPose | ownPlayerPoses [3] |
| A list of located own robots. | |
Friends | |
| In & | operator>> (In &stream, PlayerPoseCollection &playerPoseCollection) |
| give the In operator acess to protected members | |
| Out & | operator<< (Out &stream, const PlayerPoseCollection &playerPoseCollection) |
| give the Out operator acess to protected members | |
Definition at line 142 of file PlayerPoseCollection.h.
|
|
Constructor.
Definition at line 21 of file PlayerPoseCollection.cpp. References numberOfOpponentPlayers, and numberOfOwnPlayers. |
|
|
Copy-Constructor.
Definition at line 31 of file PlayerPoseCollection.cpp. |
|
|
Destructor.
Definition at line 27 of file PlayerPoseCollection.cpp. |
|
||||||||||||
|
sets a player pose of the own team at a given index
Definition at line 155 of file PlayerPoseCollection.h. References ownPlayerPoses. Referenced by GT2004PlayersLocator::execute(), and operator=(). |
|
||||||||||||||||||||
|
sets a player pose of the own team at a given index
Definition at line 158 of file PlayerPoseCollection.h. References ownPlayerPoses, and PlayerPose::setPose(). |
Here is the call graph for this function:

|
||||||||||||||||||||||||
|
sets a player pose of the own team at a given index
Definition at line 162 of file PlayerPoseCollection.h. References ownPlayerPoses, PlayerPose::setPose(), and PlayerPose::setValidity(). |
Here is the call graph for this function:

|
|
returns a player pose of the own team for a given index
Definition at line 169 of file PlayerPoseCollection.h. References ownPlayerPoses. Referenced by AngleSymbols::calculateCombinedAngles(), GT2004ObstaclesLocator::determineNextFreeTeammate(), GT2004PlayersLocator::execute(), GT2004StrategySymbols::getAngleToTeammate(), operator=(), and Field::placePlayers(). |
|
||||||||||||
|
sets a player pose of the opponent team at a given index
Definition at line 172 of file PlayerPoseCollection.h. References opponentPlayerPoses. Referenced by GT2004PlayersLocator::execute(), and operator=(). |
|
||||||||||||||||||||
|
sets a player pose of the opponent team at a given index
Definition at line 175 of file PlayerPoseCollection.h. References opponentPlayerPoses, and PlayerPose::setPose(). |
Here is the call graph for this function:

|
||||||||||||||||||||||||
|
sets a player pose of the opponent team at a given index
Definition at line 179 of file PlayerPoseCollection.h. References opponentPlayerPoses, PlayerPose::setPose(), and PlayerPose::setValidity(). |
Here is the call graph for this function:

|
|
returns a player pose of the opponent team for a given index
Definition at line 186 of file PlayerPoseCollection.h. References opponentPlayerPoses. Referenced by operator=(), Field::placePlayers(), and GTStandardConverter::setData(). |
|
|
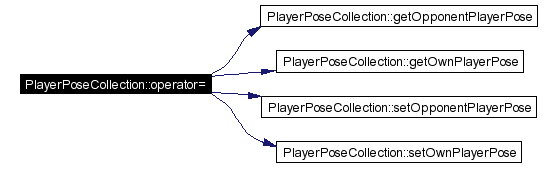
copies another PlayerPoseCollection to this one
Definition at line 36 of file PlayerPoseCollection.cpp. References getOpponentPlayerPose(), getOwnPlayerPose(), numberOfOpponentPlayers, numberOfOwnPlayers, setOpponentPlayerPose(), and setOwnPlayerPose(). |
Here is the call graph for this function:
|
||||||||||||
|
give the In operator acess to protected members
Definition at line 51 of file PlayerPoseCollection.cpp. |
|
||||||||||||
|
give the Out operator acess to protected members
Definition at line 71 of file PlayerPoseCollection.cpp. |
|
|
Number of located opponent robots.
Definition at line 192 of file PlayerPoseCollection.h. Referenced by GT2004PlayersLocator::execute(), operator<<(), operator=(), operator>>(), Field::placePlayers(), PlayerPoseCollection(), and GTStandardConverter::setData(). |
|
|
Number of located own robots.
Definition at line 195 of file PlayerPoseCollection.h. Referenced by AngleSymbols::calculateCombinedAngles(), GT2004ObstaclesLocator::determineNextFreeTeammate(), GT2004PlayersLocator::execute(), GT2004StrategySymbols::getAngleToTeammate(), operator<<(), operator=(), operator>>(), Field::placePlayers(), and PlayerPoseCollection(). |
|
|
A list of located opponent robots.
Definition at line 205 of file PlayerPoseCollection.h. Referenced by getOpponentPlayerPose(), operator<<(), operator>>(), and setOpponentPlayerPose(). |
|
|
A list of located own robots.
Definition at line 208 of file PlayerPoseCollection.h. Referenced by getOwnPlayerPose(), operator<<(), operator>>(), and setOwnPlayerPose(). |
 1.3.6
1.3.6