#include <BallModel.h>
Collaboration diagram for BallModel:
Public Types | |
| enum | { behaviorControlTimeAfterWhichCommunicatedBallsAreAccepted = 6000 } |
| The time for the behaviorControl after that communicated ball positions are accepted. More... | |
Public Member Functions | |
| BallModel () | |
| Constructor. | |
| void | setFrameNumber (unsigned long frameNumber) |
| const Vector2< double > & | getKnownPosition (unsigned long timeAfterWhichCommunicatedBallsAreAccepted) const |
| Returns a "known" ball position. | |
| unsigned long | getTimeSinceLastKnown (unsigned long timeAfterWhichCommunicatedBallsAreAccepted) const |
| Returns the time since the ball was seen or communicated. | |
Public Attributes | |
| unsigned long | frameNumber |
| int | numberOfImagesWithoutBallPercept |
| int | numberOfImagesWithBallPercept |
| bool | ballWasSeen |
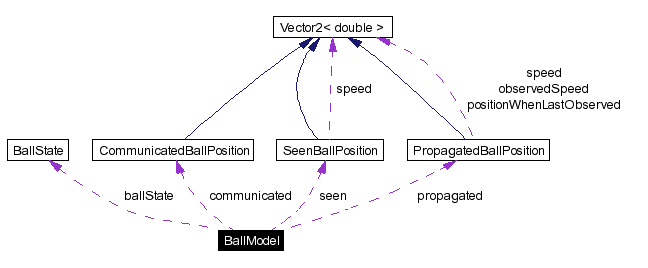
| SeenBallPosition | seen |
| The position of the ball estimated from own observations. | |
| PropagatedBallPosition | propagated |
| The position of the ball estimated from own observations and the observed ball speed; it is propagated even if the ball is not seen. | |
| CommunicatedBallPosition | communicated |
| The position of the ball estimated from own observations and from observation of other players. | |
| BallState | ballState |
| Qualitative propositions of the ball. | |
| double | validity |
| double | motionValidity |
Definition at line 157 of file BallModel.h.
|
|
The time for the behaviorControl after that communicated ball positions are accepted.
Definition at line 204 of file BallModel.h. |
|
|
Constructor.
Definition at line 123 of file BallModel.cpp. References ballWasSeen. |
|
|
Definition at line 164 of file BallModel.h. |
|
|
Returns a "known" ball position. If the ball was seen, the seen ball position is used. If the ball was not seen for a timeAfterThatCommunicatedBallsAreAccepted, the communicatedBallPosition is returned, if there was received a ball position.
Definition at line 87 of file BallModel.cpp. References communicated, SystemCall::getTimeSince(), seen, CommunicatedBallPosition::timeWhenLastObserved, and SeenBallPosition::timeWhenLastSeen. Referenced by GT2004BasicBehaviorGoaliePosition::execute(), GT2004BasicBehaviorGoToBallWithoutTurning::execute(), GT2004BasicBehaviorGoToBall::execute(), GT2004PotentialFieldBasicBehaviorOffensiveSupport::execute(), BallSymbols::getKnownAngle(), BallSymbols::getKnownDistance(), BallSymbols::getKnownX(), BallSymbols::getKnownY(), and GTStandardConverter::setData(). |
Here is the call graph for this function:

|
|
Returns the time since the ball was seen or communicated.
Definition at line 108 of file BallModel.cpp. References communicated, SystemCall::getTimeSince(), min, seen, CommunicatedBallPosition::timeWhenLastObserved, and SeenBallPosition::timeWhenLastSeen. Referenced by BallSymbols::getTimeSinceLastKnown(), and GTStandardConverter::setData(). |
Here is the call graph for this function:

|
|
Definition at line 163 of file BallModel.h. Referenced by GT2004BallLocator::execute(), operator<<(), and operator>>(). |
|
|
Definition at line 166 of file BallModel.h. Referenced by GT2004BallLocator::determineNumberOfImagesWith_WithoutBall(), and BallSymbols::getNumberOfImagesWithoutBallPercept(). |
|
|
Definition at line 167 of file BallModel.h. Referenced by GT2004BallLocator::determineNumberOfImagesWith_WithoutBall(), and BallSymbols::getNumberOfImagesWithBallPercept(). |
|
|
Definition at line 169 of file BallModel.h. Referenced by BallModel(), GT2004BallLocator::determineNumberOfImagesWith_WithoutBall(), GT2004BehaviorControl::preExecute(), and BallSymbols::registerSymbols(). |
|
|
|
The position of the ball estimated from own observations and the observed ball speed; it is propagated even if the ball is not seen.
Definition at line 178 of file BallModel.h. Referenced by GT2004BallLocator::handleSeenBall(), GT2004BallLocator::handleUnseenBall(), and GT2004BallLocator::setUnknownResult(). |
|
|
The position of the ball estimated from own observations and from observation of other players.
Definition at line 184 of file BallModel.h. Referenced by GT2004HeadControlSymbols::getCommunicatedBallDistance(), getKnownPosition(), getTimeSinceLastKnown(), and GT2004BehaviorControl::preExecute(). |
|
|
Qualitative propositions of the ball.
Definition at line 187 of file BallModel.h. Referenced by BallSymbols::getProjectedDistanceOnYAxis(), BallSymbols::getTimeUntilBallCrossesYAxis(), GT2004BehaviorControl::postExecute(), BallSymbols::registerSymbols(), GT2004BallLocator::setBallState(), and GT2004BallLocator::setBallStateV2(). |
|
|
Definition at line 207 of file BallModel.h. |
|
|
Definition at line 208 of file BallModel.h. Referenced by BallSymbols::getMotionValidity(). |
 1.3.6
1.3.6