
#include <Image.h>
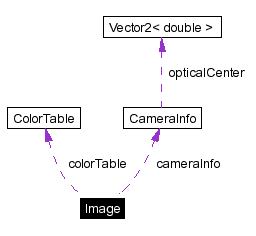
Inheritance diagram for Image:
Public Member Functions | |
| Image () | |
| constructs an image | |
| ~Image () | |
| deconstructs an image | |
| bool | hasColorTable (void) |
| void | setColorTable (const ColorTable *ct) |
| char | getClassifiedColor (int x, int y) |
| char | getClassifiedColor (unsigned long index) |
| void | convertFromYUVToRGB (const Image &yuvImage) |
| Converts an YUV image into an RGB image. | |
| void | convertFromYCbCrToRGB (const Image &ycbcrImage) |
| Converts an YCbCr image into an RGB image. | |
| void | convertFromRGBToYUV (const Image &rgbImage) |
| Converts an RGB image into an YUV image. | |
| void | convertFromYCbCrToHSI (const Image &ycrcbImage) |
| Converts an YCbCr image into an HSI image. | |
| void | convertFromYUVToTSL (const Image &yuvImage) |
| Converts an YUV image into an TSL image. | |
| unsigned char | getHighResY (int x, int y) const |
| Returns the high resolution y value of a pixel. | |
| void | setHighResY (int x, int y, unsigned char tl, unsigned char bl, unsigned char tr, unsigned char br) |
| Sets the high resolution y values for one pixel in low resolution. | |
| Image & | operator= (const Image &other) |
| Assignment operator. | |
| void | setCameraInfo () |
| set values in CameraInfo according to image size | |
Static Public Member Functions | |
| void | convertFromYCbCrToRGB (unsigned char Y, unsigned char Cb, unsigned char Cr, unsigned char &R, unsigned char &G, unsigned char &B) |
| Converts an YCbCr pixel into an RGB pixel. | |
| void | convertFromYCbCrToHSI (unsigned char Y, unsigned char Cb, unsigned char Cr, unsigned char &H, unsigned char &S, unsigned char &I) |
| Converts an YCbCr pixel into an HSI pixel. | |
Public Attributes | |
| unsigned char | image [cameraResolutionHeight_ERS7][6][cameraResolutionWidth_ERS7] |
| representation for an image height color width point of origin is the upper left corner, height is positive downwards and width positive to the right the color values are in the order Y,U,V | |
| CameraInfo | cameraInfo |
| unsigned long | frameNumber |
| the frame number of that image | |
| const ColorTable * | colorTable |
| associated color table | |
Definition at line 24 of file Image.h.
|
|
constructs an image
Definition at line 13 of file Image.cpp. References CameraInfo::resolutionHeight, and CameraInfo::resolutionWidth. |
|
|
deconstructs an image
|
|
|
Definition at line 31 of file Image.cpp. References colorTable. |
|
|
Definition at line 41 of file Image.cpp. References colorTable. Referenced by ObstacleAvoiderOnGreenFieldERS7::execute(), and ObstacleAvoiderOnGreenField::execute(). |
|
||||||||||||
|
Definition at line 47 of file Image.cpp. References colorTable, and ColorTable::getColorClass(). Referenced by ObstacleAvoiderOnGreenFieldERS7::execute(), and ObstacleAvoiderOnGreenField::execute(). |
Here is the call graph for this function:

|
|
|
|
|
Converts an YUV image into an RGB image.
Definition at line 54 of file Image.cpp. References convertFromYCbCrToRGB(). Referenced by LogPlayer::saveImages(). |
Here is the call graph for this function:

|
||||||||||||||||||||||||||||
|
Converts an YCbCr pixel into an RGB pixel.
Definition at line 52 of file Image.h. References Y. Referenced by convertFromYCbCrToHSI(), convertFromYCbCrToRGB(), convertFromYUVToRGB(), and GT2004BallSpecialist::getSimilarityToOrange(). |
|
|
Converts an YCbCr image into an RGB image.
Definition at line 82 of file Image.cpp. References cameraInfo, convertFromYCbCrToRGB(), image, CameraInfo::resolutionHeight, and CameraInfo::resolutionWidth. |
Here is the call graph for this function:

|
|
Converts an RGB image into an YUV image.
Definition at line 95 of file Image.cpp. References cameraInfo, image, CameraInfo::resolutionHeight, CameraInfo::resolutionWidth, U(), V(), and Y. |
Here is the call graph for this function:
|
||||||||||||||||||||||||||||
|
Converts an YCbCr pixel into an HSI pixel.
Definition at line 88 of file Image.h. References convertFromYCbCrToRGB(), I, pi2, and Y. Referenced by convertFromYCbCrToHSI(). |
Here is the call graph for this function:

|
|
Converts an YCbCr image into an HSI image.
Definition at line 133 of file Image.cpp. References cameraInfo, convertFromYCbCrToHSI(), image, CameraInfo::resolutionHeight, and CameraInfo::resolutionWidth. |
Here is the call graph for this function:

|
|
Converts an YUV image into an TSL image.
Definition at line 146 of file Image.cpp. References cameraInfo, image, CameraInfo::resolutionHeight, CameraInfo::resolutionWidth, U(), V(), and Y. |
Here is the call graph for this function:
|
||||||||||||
|
Returns the high resolution y value of a pixel.
Definition at line 216 of file Image.cpp. Referenced by ColorTable64::generateHighResColorClassImage(), and ColorTable32K::generateHighResColorClassImage(). |
|
||||||||||||||||||||||||||||
|
Sets the high resolution y values for one pixel in low resolution.
|
|
|
Assignment operator.
Reimplemented in JPEGImage. |
|
|
|
|
|
the frame number of that image
Definition at line 171 of file Image.h. Referenced by SimpleMotionRecognition::execute(), BB2004Calibrator::execute(), GT2004ImageProcessor::execute(), CheckerboardDetector::execute(), FastSUSANNoiseReduction::getFilteredImage(), RasterImageProcessor::init(), ColorCorrector::load(), operator<<(), JPEGImage::operator=(), operator>>(), and JPEGImage::toImage(). |
|
|
associated color table
Definition at line 174 of file Image.h. Referenced by getClassifiedColor(), FastSUSANNoiseReduction::getFilteredImage(), hasColorTable(), and setColorTable(). |
 1.3.6
1.3.6