#include <BallPercept.h>
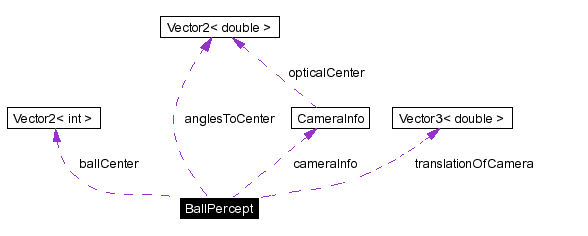
Collaboration diagram for BallPercept:
Public Member Functions | |
| BallPercept () | |
| Constructor. | |
| BallPercept (const BallPercept &other) | |
| BallPercept & | operator= (const BallPercept &other) |
| void | reset (unsigned long frameNumber) |
| The functions resets the percept. | |
| void | add (Vector2< double > anglesToCenter, double ballRadiusAsAngle, Vector3< double > translationOfCamera, bool isCameraMatrixValid) |
| The function adds a seen ball to the percept. | |
| void | add (CameraInfo cameraInfo, Vector2< int > ballCenter, double ballRadiusInPixel, Vector2< double > anglesToCenter, double ballRadiusAsAngle, Vector3< double > translationOfCamera, bool isCameraMatrixValid) |
| Adds a seen ball to the percept, specifing its center and radius in image coords. | |
| double | getAngle () const |
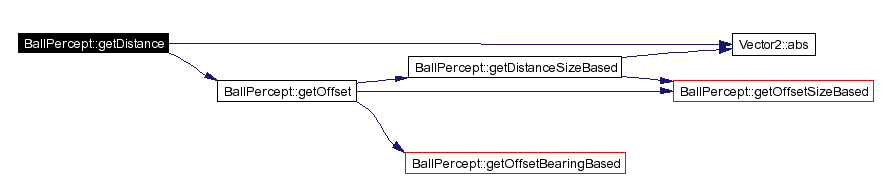
| double | getDistance () const |
| double | getAngleBearingBased () const |
| double | getDistanceBearingBased () const |
| double | getAngleSizeBased () const |
| double | getDistanceSizeBased () const |
| double | getAngleIntrinsicBased () const |
| The following methods are calculating the ball position based on size, position in image plane coords and camera intrinsic parameters. | |
| double | getDistanceIntrinsicBased () const |
| void | getOffset (Vector2< double > &offset) const |
| void | getOffsetSizeBased (Vector2< double > &offset) const |
| void | getOffsetBearingBased (Vector2< double > &offset) const |
| void | getOffsetIntrinsic (Vector2< double > &offset) const |
| Calculates ball position based on intrinsic camera parameters, instead of opening angle width. | |
Public Attributes | |
| bool | ballWasSeen |
| Indicates if the ball was seen. | |
| unsigned long | frameNumber |
| The frame number of the image that was used to create the percept. | |
| Vector2< double > | anglesToCenter |
| The horizontal and the vertical angle from the camera to the ball. | |
| Vector3< double > | translationOfCamera |
| The translation of the camera relative to the robot. | |
| double | ballRadiusAsAngle |
| The radius of the ball in the image (measure: angle). | |
| Vector2< int > | ballCenter |
| The center of the ball in pixel coords. | |
| double | ballRadiusInPixel |
| The radius of the ball in pixels. | |
| bool | isCameraMatrixValid |
| Indicates, if the camera matrix was reliable when the percept was created. | |
| CameraInfo | cameraInfo |
Private Member Functions | |
| void | checkOffset (Vector2< double > &offset) const |
Definition at line 25 of file BallPercept.h.
|
|
Constructor.
Definition at line 31 of file BallPercept.h. References reset(). |
Here is the call graph for this function:

|
|
Definition at line 32 of file BallPercept.h. |
|
|
Definition at line 14 of file BallPercept.cpp. References anglesToCenter, ballCenter, ballRadiusAsAngle, ballRadiusInPixel, ballWasSeen, cameraInfo, frameNumber, isCameraMatrixValid, and translationOfCamera. |
|
|
The functions resets the percept.
Definition at line 39 of file BallPercept.h. Referenced by BallPercept(), GT2004ImageProcessor::execute(), and RasterImageProcessor::init(). |
|
||||||||||||||||||||
|
The function adds a seen ball to the percept.
Definition at line 28 of file BallPercept.cpp. Referenced by RBallSpecialist2::addBallPercept(). |
|
||||||||||||||||||||||||||||||||
|
Adds a seen ball to the percept, specifing its center and radius in image coords.
Definition at line 42 of file BallPercept.cpp. |
|
|
Definition at line 90 of file BallPercept.h. References getRobotConfiguration(), RobotConfiguration::getRobotDimensions(), RobotDimensions::lowerBodyWidth, Vector2< V >::x, and Vector2< V >::y. Referenced by getOffsetBearingBased(), getOffsetIntrinsic(), and getOffsetSizeBased(). |
Here is the call graph for this function:

|
|
Definition at line 151 of file BallPercept.cpp. References Vector2< V >::angle(), and getOffset(). |
Here is the call graph for this function:

|
|
Definition at line 144 of file BallPercept.cpp. References Vector2< V >::abs(), and getOffset(). Referenced by GT2004BallLocator::execute(). |
Here is the call graph for this function:
|
|
Definition at line 172 of file BallPercept.cpp. References Vector2< V >::angle(), and getOffsetBearingBased(). |
Here is the call graph for this function:

|
|
Definition at line 158 of file BallPercept.cpp. References Vector2< V >::abs(), and getOffsetBearingBased(). |
Here is the call graph for this function:

|
|
Definition at line 179 of file BallPercept.cpp. References Vector2< V >::angle(), and getOffsetSizeBased(). Referenced by GT2004BallLocator::execute(). |
Here is the call graph for this function:

|
|
Definition at line 165 of file BallPercept.cpp. References Vector2< V >::abs(), and getOffsetSizeBased(). Referenced by GT2004BallLocator::execute(), and getOffset(). |
Here is the call graph for this function:

|
|
The following methods are calculating the ball position based on size, position in image plane coords and camera intrinsic parameters.
Definition at line 193 of file BallPercept.cpp. References Vector2< V >::angle(), and getOffsetIntrinsic(). |
Here is the call graph for this function:

|
|
Definition at line 186 of file BallPercept.cpp. References Vector2< V >::abs(), and getOffsetIntrinsic(). |
Here is the call graph for this function:

|
|
Definition at line 127 of file BallPercept.cpp. References anglesToCenter, getDistanceSizeBased(), getOffsetBearingBased(), getOffsetSizeBased(), isCameraMatrixValid, and Vector2< double >::y. Referenced by GT2004BallLocator::execute(), getAngle(), getDistance(), and GT2004BallLocator::handleSeenBall(). |
Here is the call graph for this function:

|
|
Definition at line 106 of file BallPercept.cpp. References anglesToCenter, ballRadiusAsAngle, checkOffset(), Geometry::getBallDistanceByAngleSize(), sqr, translationOfCamera, Vector2< double >::x, Vector3< double >::x, Vector2< V >::x, Vector3< double >::y, Vector2< V >::y, and Vector3< double >::z. Referenced by getAngleSizeBased(), getDistanceSizeBased(), and getOffset(). |
Here is the call graph for this function:

|
|
Definition at line 62 of file BallPercept.cpp. References anglesToCenter, checkOffset(), translationOfCamera, Vector2< double >::x, Vector3< double >::x, Vector2< V >::x, Vector3< double >::y, Vector2< V >::y, Vector2< double >::y, and Vector3< double >::z. Referenced by getAngleBearingBased(), getDistanceBearingBased(), and getOffset(). |
Here is the call graph for this function:

|
|
Calculates ball position based on intrinsic camera parameters, instead of opening angle width.
Definition at line 79 of file BallPercept.cpp. References anglesToCenter, ballCenter, ballRadiusInPixel, cameraInfo, checkOffset(), Geometry::getDistanceBySize(), sqr, translationOfCamera, Vector2< double >::x, Vector3< double >::x, Vector2< V >::x, Vector2< int >::x, Vector3< double >::y, Vector2< V >::y, Vector2< int >::y, and Vector3< double >::z. Referenced by getAngleIntrinsicBased(), and getDistanceIntrinsicBased(). |
Here is the call graph for this function:

|
|
Indicates if the ball was seen.
Definition at line 35 of file BallPercept.h. Referenced by GT2004BallLocator::determineNumberOfImagesWith_WithoutBall(), GT2004BallLocator::execute(), operator<<(), operator=(), and operator>>(). |
|
|
The frame number of the image that was used to create the percept.
Definition at line 36 of file BallPercept.h. Referenced by operator<<(), operator=(), and operator>>(). |
|
|
The horizontal and the vertical angle from the camera to the ball. The reference is not the optical axis but the axes of the coordinate system of the robot. Definition at line 64 of file BallPercept.h. Referenced by getOffset(), getOffsetBearingBased(), getOffsetIntrinsic(), getOffsetSizeBased(), operator<<(), operator=(), and operator>>(). |
|
|
The translation of the camera relative to the robot.
Definition at line 69 of file BallPercept.h. Referenced by getOffsetBearingBased(), getOffsetIntrinsic(), getOffsetSizeBased(), operator<<(), operator=(), and operator>>(). |
|
|
The radius of the ball in the image (measure: angle).
Definition at line 74 of file BallPercept.h. Referenced by getOffsetSizeBased(), operator<<(), operator=(), and operator>>(). |
|
|
The center of the ball in pixel coords.
Definition at line 78 of file BallPercept.h. Referenced by getOffsetIntrinsic(), operator<<(), operator=(), and operator>>(). |
|
|
The radius of the ball in pixels.
Definition at line 81 of file BallPercept.h. Referenced by getOffsetIntrinsic(), operator<<(), operator=(), and operator>>(). |
|
|
Indicates, if the camera matrix was reliable when the percept was created.
Definition at line 84 of file BallPercept.h. Referenced by getOffset(), operator<<(), operator=(), and operator>>(). |
|
|
Definition at line 86 of file BallPercept.h. Referenced by getOffsetIntrinsic(), operator<<(), operator=(), and operator>>(). |
 1.3.6
1.3.6