#include <LandmarksPercept.h>
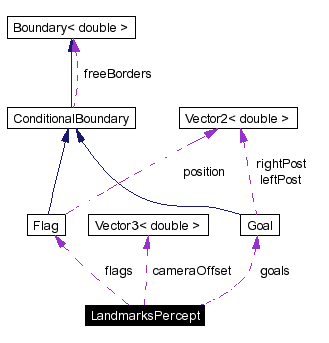
Collaboration diagram for LandmarksPercept:
Public Member Functions | |
| LandmarksPercept () | |
| Constructor. | |
| void | reset (unsigned long frameNumber) |
| The function resets the object, i.e. | |
| void | addFlag (Flag::FlagType type, const Vector2< double > &position, const ConditionalBoundary &boundary) |
| The function adds a flag to the flag array. | |
| void | addFlag (Flag::FlagType type, bool ownTeamColorIsBlue, const ConditionalBoundary &boundary) |
| The function adds a flag to the flag array. | |
| void | estimateOffsetForFlags (const Vector2< double > &cameraOffset) |
| Calculates distance and angle for each flag. | |
| void | addGoal (colorClass color, const Vector2< double > &leftPost, const Vector2< double > &rightPost, const ConditionalBoundary &boundary) |
| The function adds a goal to the goal array. | |
| void | addGoal (colorClass color, bool ownTeamColorIsBlue, const ConditionalBoundary &boundary) |
| The function adds a goal to the goal array. | |
| void | estimateOffsetForGoals (const Vector2< double > &cameraOffset) |
| Calculates distance and angle for each goal. | |
Public Attributes | |
| Flag | flags [4] |
| The array of up to 4 flags. | |
| int | numberOfFlags |
| The number of flags actually stored in the array. | |
| Goal | goals [2] |
| The array of up to 2 goals. | |
| int | numberOfGoals |
| The number of goals actually stored in the array. | |
| Vector3< double > | cameraOffset |
| The camera offset relative to position of the robot's neck. | |
| unsigned long | frameNumber |
| The frame number when perceived. | |
Definition at line 156 of file LandmarksPercept.h.
|
|
Constructor. Resets the object. Definition at line 47 of file LandmarksPercept.cpp. References reset(). |
Here is the call graph for this function:

|
|
The function resets the object, i.e. the numbers of flags and goals are set to 0. Definition at line 52 of file LandmarksPercept.cpp. References numberOfFlags, and numberOfGoals. Referenced by GT2004ImageProcessor::execute(), RasterImageProcessor::init(), and LandmarksPercept(). |
|
||||||||||||||||
|
The function adds a flag to the flag array.
Definition at line 58 of file LandmarksPercept.cpp. References flags, numberOfFlags, Flag::position, and Flag::type. Referenced by RasterImageProcessor::addFlag(). |
|
||||||||||||||||
|
The function adds a flag to the flag array.
Definition at line 73 of file LandmarksPercept.cpp. References Vector2< V >::x, and Vector2< V >::y. |
|
|
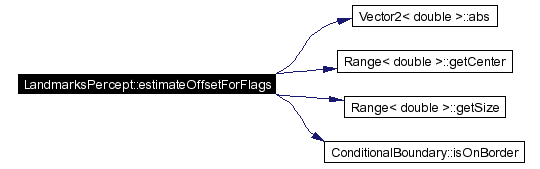
Calculates distance and angle for each flag.
Definition at line 112 of file LandmarksPercept.cpp. References Vector2< double >::abs(), Flag::angle, Flag::angleValidity, Flag::distance, Flag::distanceValidity, Range< double >::getCenter(), Range< double >::getSize(), ConditionalBoundary::isOnBorder(), Range< double >::max, Range< double >::min, Pose2D::translation, Boundary< double >::x, and Boundary< double >::y. Referenced by BoxSpecialist::executePostProcessing(). |
Here is the call graph for this function:
|
||||||||||||||||||||
|
The function adds a goal to the goal array.
Definition at line 170 of file LandmarksPercept.cpp. References Goal::color, goals, Goal::leftPost, numberOfGoals, and Goal::rightPost. Referenced by BoxSpecialist::fusionGoal(), GoalRecognizer::scanLinesForGoals(), GT2004GoalRecognizer::scanLinesForGoals(), and BoxSpecialist::searchGoal(). |
|
||||||||||||||||
|
The function adds a goal to the goal array.
Definition at line 185 of file LandmarksPercept.cpp. References colorClass, Vector2< V >::x, and Vector2< V >::y. |
|
|
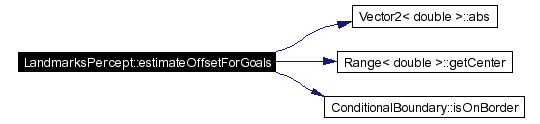
Calculates distance and angle for each goal.
Definition at line 218 of file LandmarksPercept.cpp. References Vector2< double >::abs(), Goal::angle, Goal::angleValidity, Goal::distance, Goal::distanceValidity, Range< double >::getCenter(), idText, ConditionalBoundary::isOnBorder(), Range< double >::max, Range< double >::min, OUTPUT, Goal::rotation, Pose2D::translation, Boundary< double >::x, and Boundary< double >::y. Referenced by BoxSpecialist::executePostProcessing(), GoalRecognizer::scanLinesForGoals(), and GT2004GoalRecognizer::scanLinesForGoals(). |
Here is the call graph for this function:
|
|
The array of up to 4 flags.
Definition at line 159 of file LandmarksPercept.h. Referenced by addFlag(), GT2004SelfLocator::execute(), GT2004SelfLocator::generatePoseTemplates(), operator<<(), operator>>(), and LandmarksState::update(). |
|
|
The number of flags actually stored in the array.
Definition at line 160 of file LandmarksPercept.h. Referenced by addFlag(), GT2004SelfLocator::execute(), GT2004SelfLocator::generatePoseTemplates(), operator<<(), operator>>(), reset(), and LandmarksState::update(). |
|
|
The array of up to 2 goals.
Definition at line 161 of file LandmarksPercept.h. Referenced by addGoal(), NoOdometrySelfLocator::execute(), GT2004SelfLocator::execute(), GT2004BallLocator::execute(), GT2004SelfLocator::getBearing(), operator<<(), and operator>>(). |
|
|
The number of goals actually stored in the array.
Definition at line 162 of file LandmarksPercept.h. Referenced by addGoal(), NoOdometrySelfLocator::execute(), GT2004SelfLocator::execute(), GT2004BallLocator::execute(), GT2004SelfLocator::generatePoseTemplates(), operator<<(), operator>>(), and reset(). |
|
|
The camera offset relative to position of the robot's neck.
Definition at line 163 of file LandmarksPercept.h. Referenced by NoOdometrySelfLocator::execute(), GT2004SelfLocator::execute(), GT2004ImageProcessor::execute(), GT2004SelfLocator::generatePoseTemplates(), RasterImageProcessor::init(), operator<<(), and operator>>(). |
|
|
The frame number when perceived.
Definition at line 164 of file LandmarksPercept.h. Referenced by NoOdometrySelfLocator::execute(), GT2004SelfLocator::execute(), operator<<(), and operator>>(). |
 1.3.6
1.3.6