#include <LandmarksPercept.h>
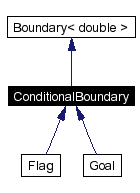
Inheritance diagram for ConditionalBoundary:
Public Member Functions | |
| ConditionalBoundary () | |
| Constructor. | |
| void | addX (const double px, bool isOnBorder) |
| The function adds a point to the boundary. | |
| void | addY (const double py, bool isOnBorder) |
| The function adds a point to the boundary. | |
| void | add (const ConditionalBoundary &b) |
| The function adds another boundary to this one. | |
| bool | isOnBorder (const double &border) const |
| The function determines whether a certain edge lies on the image border. | |
Private Attributes | |
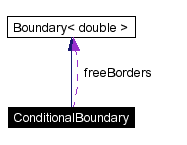
| Boundary< double > | freeBorders |
| Contains the edges that do not touch the image border. | |
It also encodes, which edges of the boundary touch the image border.
Definition at line 23 of file LandmarksPercept.h.
|
|
Constructor. The boundary is empty. Definition at line 33 of file LandmarksPercept.h. References freeBorders, and pi. |
|
||||||||||||
|
The function adds a point to the boundary.
Definition at line 42 of file LandmarksPercept.h. References Range< double >::add(), freeBorders, and Boundary< double >::x. Referenced by RasterImageProcessor::addFlag(), BoxSpecialist::fusionGoal(), GT2004FlagSpecialist::getFlagPercept(), GoalRecognizer::scanLinesForGoals(), GT2004GoalRecognizer::scanLinesForGoals(), and BoxSpecialist::searchGoal(). |
Here is the call graph for this function:

|
||||||||||||
|
The function adds a point to the boundary.
Definition at line 55 of file LandmarksPercept.h. References Range< double >::add(), freeBorders, and Boundary< double >::y. Referenced by RasterImageProcessor::addFlag(), BoxSpecialist::fusionGoal(), GT2004FlagSpecialist::getFlagPercept(), GoalRecognizer::scanLinesForGoals(), GT2004GoalRecognizer::scanLinesForGoals(), and BoxSpecialist::searchGoal(). |
Here is the call graph for this function:

|
|
The function adds another boundary to this one.
Definition at line 66 of file LandmarksPercept.h. References Boundary< double >::add(), Boundary< T >::add(), and freeBorders. Referenced by GoalRecognizer::scanLinesForGoals(), and GT2004GoalRecognizer::scanLinesForGoals(). |
Here is the call graph for this function:

|
|
The function determines whether a certain edge lies on the image border.
Definition at line 80 of file LandmarksPercept.h. References freeBorders, Range< double >::max, Range< double >::min, Boundary< double >::x, and Boundary< double >::y. Referenced by GT2004SelfLocator::addFlag(), LandmarksPercept::estimateOffsetForFlags(), GT2004FlagSpecialist::estimateOffsetForFlags(), LandmarksPercept::estimateOffsetForGoals(), GT2004SelfLocator::execute(), GT2004SelfLocator::getBearing(), GoalRecognizer::scanLinesForGoals(), and GT2004GoalRecognizer::scanLinesForGoals(). |
|
|
Contains the edges that do not touch the image border.
Definition at line 26 of file LandmarksPercept.h. Referenced by add(), addX(), addY(), ConditionalBoundary(), and isOnBorder(). |
 1.3.6
1.3.6