#include <BB2004Calibrator.h>
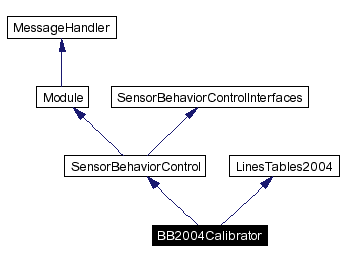
Inheritance diagram for BB2004Calibrator:
Public Member Functions | |
| BB2004Calibrator (const SensorBehaviorControlInterfaces &interfaces) | |
| Constructor. | |
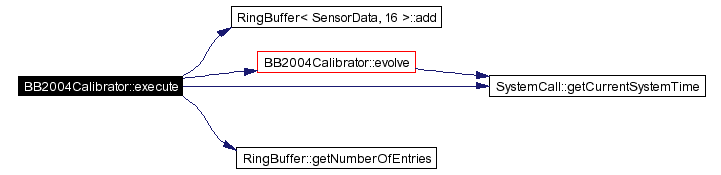
| virtual void | execute () |
| The function executes the module. | |
| virtual bool | handleMessage (InMessage &message) |
| The function handles messages sent to the module. | |
Private Types | |
| enum | { numOfIndividuals = 15, waitPerGeneration = 10000 } |
Private Member Functions | |
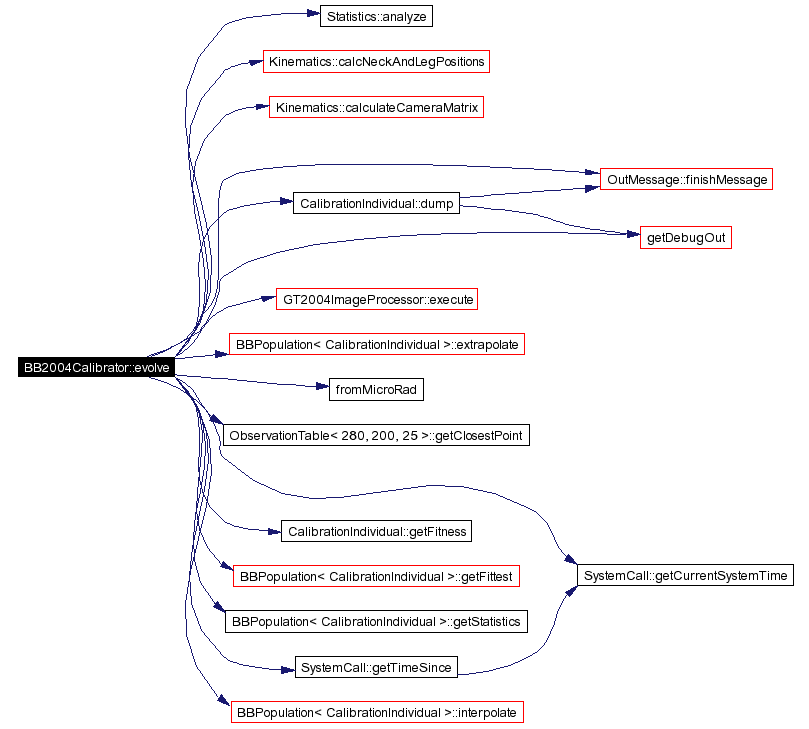
| void | evolve (const SensorData &sensorData) |
| The function performs a single evolution step. | |
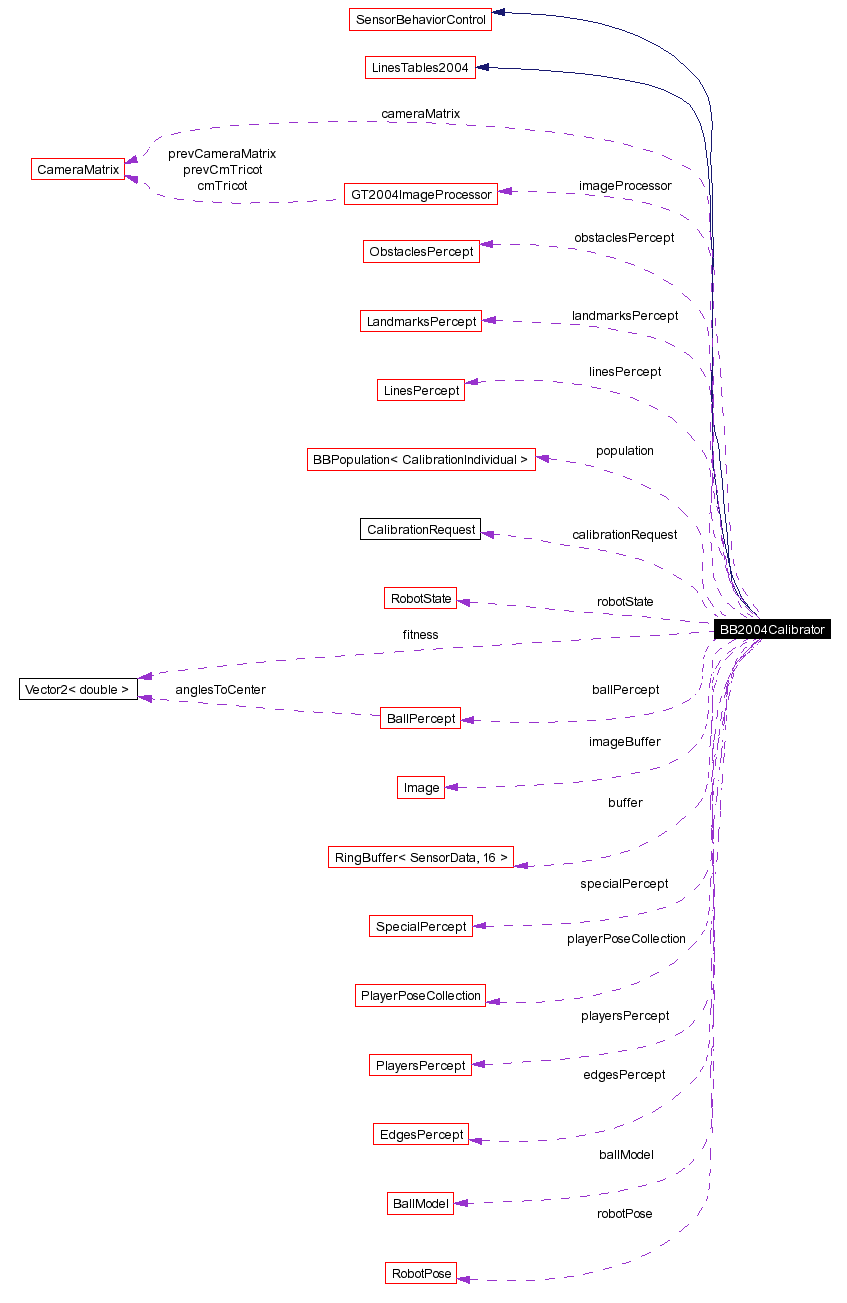
Private Attributes | |
| CameraMatrix | cameraMatrix |
| The camera matrix that will be set for the image processor. | |
| RobotPose | robotPose |
| A dummy robot pose for the image processor. | |
| BallModel | ballModel |
| A dummy ball model for the image processor. | |
| PlayerPoseCollection | playerPoseCollection |
| A dummy player pose collection for the image processor. | |
| RobotState | robotState |
| A dummy robot state for the image processor. | |
| CalibrationRequest | calibrationRequest |
| A dummy calibration request for the image processor. | |
| LandmarksPercept | landmarksPercept |
| A dummy landmark percept for the image processor. | |
| BallPercept | ballPercept |
| A dummy ball percept for the image processor. | |
| LinesPercept | linesPercept |
| The lines percept that will be returned by image processor. | |
| EdgesPercept | edgesPercept |
| The edges percept that will be returned by image processor. | |
| PlayersPercept | playersPercept |
| A dummy players percept for the image processor. | |
| ObstaclesPercept | obstaclesPercept |
| A dummy obstacles percept for the image processor. | |
| SpecialPercept | specialPercept |
| A dummy special percept for the image processor. | |
| GT2004ImageProcessor | imageProcessor |
| The standard image processor used for calibration. | |
| RingBuffer< SensorData, 16 > | buffer |
| A buffer for the sensor data of the previous 16 frames. | |
| Image | imageBuffer |
| A buffer for the previous image. | |
| BBPopulation< CalibrationIndividual > | population |
| The population of individuals. | |
| Vector2< double > | fitness [numOfIndividuals] |
| The accumulated (temporary) fitnesses of the individuals. | |
| int | evolutions |
| A counter for the number of evolutions. | |
| int | count [numOfIndividuals] |
| Variables that count how many fitnesses have been accumulated in "fitnesses". | |
| unsigned | timeStamp |
| The beginning of the current evaluation of the individuals. | |
Definition at line 91 of file BB2004Calibrator.h.
|
|
Definition at line 129 of file BB2004Calibrator.h. |
|
|
Constructor.
Definition at line 75 of file BB2004Calibrator.cpp. References numOfIndividuals. |
|
|
The function executes the module.
Implements Module. Definition at line 100 of file BB2004Calibrator.cpp. References RingBuffer< SensorData, 16 >::add(), evolutions, evolve(), SensorDataBuffer::frame, Image::frameNumber, SystemCall::getCurrentSystemTime(), RingBuffer< SensorData, 16 >::getNumberOfEntries(), HeadControlMode::headControlMode, imageBuffer, MotionRequest::motionType, SensorDataBuffer::numOfFrames, MotionRequest::tailRequest, TailRequest::tailRequestID, WalkRequest::walkParams, MotionRequest::walkRequest, and WalkRequest::walkType. |
Here is the call graph for this function:
|
|
The function handles messages sent to the module.
Reimplemented from Module. Definition at line 204 of file BB2004Calibrator.cpp. |
|
Here is the call graph for this function:
|
|
The camera matrix that will be set for the image processor.
Reimplemented from SensorBehaviorControlInterfaces. Definition at line 113 of file BB2004Calibrator.h. |
|
|
A dummy robot pose for the image processor.
Definition at line 114 of file BB2004Calibrator.h. |
|
|
A dummy ball model for the image processor.
Definition at line 115 of file BB2004Calibrator.h. |
|
|
A dummy player pose collection for the image processor.
Definition at line 116 of file BB2004Calibrator.h. |
|
|
A dummy robot state for the image processor.
Reimplemented from SensorBehaviorControlInterfaces. Definition at line 117 of file BB2004Calibrator.h. |
|
|
A dummy calibration request for the image processor.
Definition at line 118 of file BB2004Calibrator.h. |
|
|
A dummy landmark percept for the image processor.
Definition at line 119 of file BB2004Calibrator.h. |
|
|
A dummy ball percept for the image processor.
Definition at line 120 of file BB2004Calibrator.h. |
|
|
The lines percept that will be returned by image processor.
Definition at line 121 of file BB2004Calibrator.h. |
|
|
The edges percept that will be returned by image processor.
Definition at line 122 of file BB2004Calibrator.h. |
|
|
A dummy players percept for the image processor.
Definition at line 123 of file BB2004Calibrator.h. |
|
|
A dummy obstacles percept for the image processor.
Definition at line 124 of file BB2004Calibrator.h. |
|
|
A dummy special percept for the image processor.
Definition at line 125 of file BB2004Calibrator.h. |
|
|
The standard image processor used for calibration.
Definition at line 126 of file BB2004Calibrator.h. |
|
|
A buffer for the sensor data of the previous 16 frames.
Definition at line 127 of file BB2004Calibrator.h. |
|
|
A buffer for the previous image.
Definition at line 128 of file BB2004Calibrator.h. Referenced by execute(). |
|
|
The population of individuals.
Definition at line 138 of file BB2004Calibrator.h. Referenced by evolve(). |
|
|
The accumulated (temporary) fitnesses of the individuals.
Definition at line 139 of file BB2004Calibrator.h. |
|
|
A counter for the number of evolutions.
Definition at line 140 of file BB2004Calibrator.h. |
|
|
Variables that count how many fitnesses have been accumulated in "fitnesses".
Definition at line 140 of file BB2004Calibrator.h. |
|
|
The beginning of the current evaluation of the individuals.
Definition at line 142 of file BB2004Calibrator.h. |
 1.3.6
1.3.6