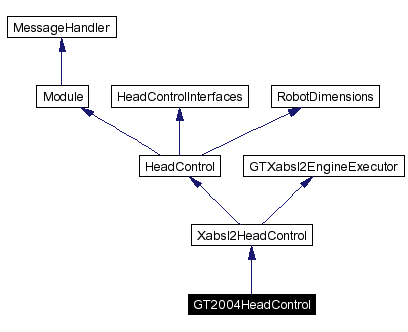
#include <GT2004HeadControl.h>
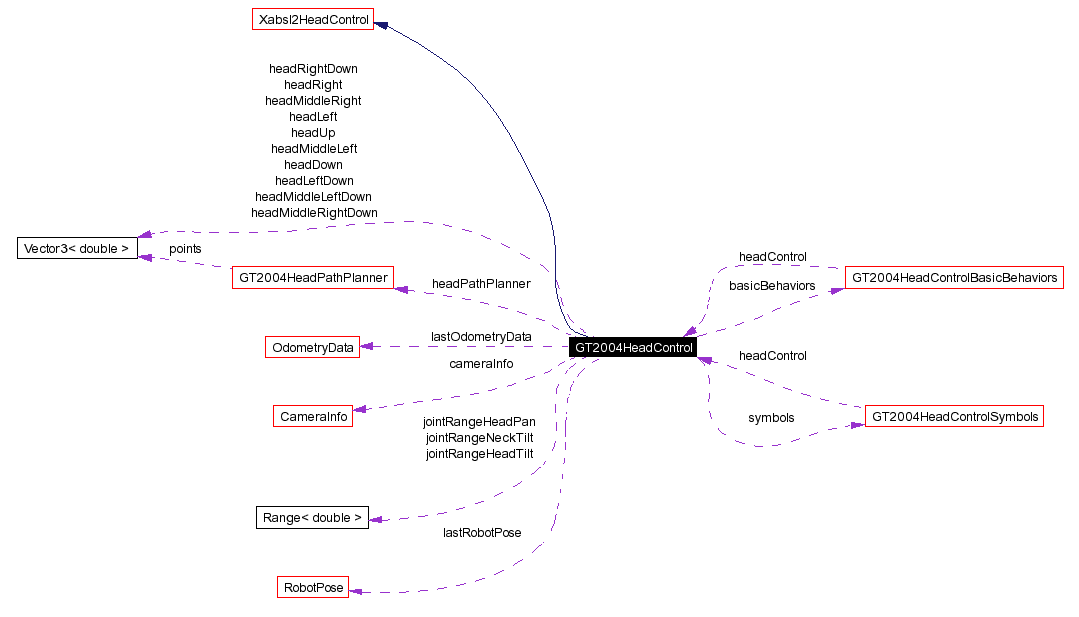
Inheritance diagram for GT2004HeadControl:
Public Types | |
| enum | { minHeadSpeed = 4000 } |
| The minimum head speed in urad per frame: 4000 = 28.6°/s. More... | |
| enum | { calibrationStateStart, calibrationStateLeft, calibrationStateLeftWait, calibrationStateRight, calibrationStateRightWait, calibrationStateDownTilt1, calibrationStateDownTilt1Wait, calibrationStateUpTilt1, calibrationStateUpTilt1Wait, calibrationStateDownTilt2, calibrationStateDownTilt2Wait, calibrationStateUpTilt2, calibrationStateUpTilt2Wait, calibrationStateUseResults, calibrationStateReady } |
Public Member Functions | |
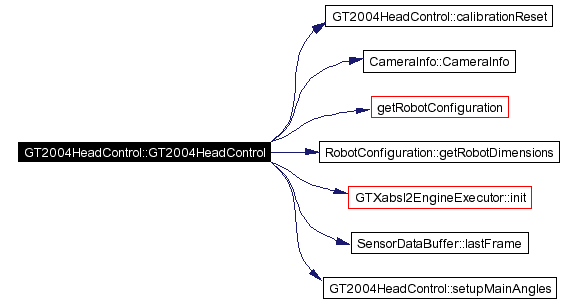
| GT2004HeadControl (HeadControlInterfaces &interfaces) | |
| Constructor. | |
| ~GT2004HeadControl () | |
| Destructor. | |
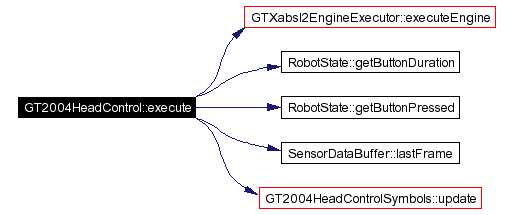
| virtual void | execute () |
| Executes the module. | |
| virtual bool | handleMessage (InMessage &message) |
| Is called for every incoming debug message. | |
| virtual void | registerSymbolsAndBasicBehaviors () |
| Registers symbols and basic behaviors at the engine. | |
| bool | headPanIsLeft () |
| Is true, if the head is on the left side. | |
| void | getSensorHeadAngles (Vector3< double > &pos) |
| put the sensor values in var pos | |
| double | headPositionDistanceToActualPosition (Vector3< double > comp, bool leftSide) |
| returns a distance between actual position and comp. | |
| void | setJoints (double tilt, double pan, double roll, double speed=0, double mouth=0) |
| deals with setting the head joints and performs optimizations so that the head does not move too fast angles are in RAD and NOT EVER AGAIN(!!) IN MICRORAD! | |
| void | setJointsDirect (double tilt, double pan, double roll, double mouth=0) |
| void | simpleLookAtPointRelativeToRobot (const Vector3< double > pos, Vector2< int > offset, double &neckTilt, double &headPan, double &headTilt) |
| void | simpleLookAtPointOnField (const Vector3< double > pos, Vector2< int > offset, double &neckTilt, double &headPan, double &headTilt) |
| Simplified "look at 3d-point" on field with offset point in camera image this is straight-forward for the ERS210, but the ERS7 has two tilt joints that can both be used to look at something. | |
| bool | simpleLookAtPointFixNeckTilt (const Vector3< double > &aim, const double &tilt1, double &headPan, double &headTilt) |
| Simplified "look at 3d-point" subroutine trying to find tilt1 solution for given tilt2/roll. | |
| void | lookAtPoint (const Vector3< double > &pos, const Vector2< int > &offset, double &tilt, double &pan, double &roll) |
| look at 3d-point on field with offset point in camera image this is straight-forward for the ERS210, but the ERS7 has two tilt joints that can both be used to look at something. | |
| bool | lookAtPointFixHeadTilt (const Vector3< double > &aim, const double &xtan, const double &ytan, double &tilt1, double &pan, const double &tilt2) |
| look at 3d-point subroutine trying to find tilt1 solution for given tilt2/roll. | |
| bool | lookAtPointFixNeckTilt (const Vector3< double > &aim, const double &xtan, const double &ytan, const double &tilt, double &pan, double &tilt2) |
| look at 3d-point subroutine trying to find tilt2 solution for given tilt1. | |
| int | calculateClosestLandmark (double direction=0, double nextLeftOrRight=0) |
| return the closest landmark w.r.t. | |
| void | aimAtLandmark (int landmark, double &neckTilt, double &headPan, double &headTilt) |
| call look-at-point depending on whether the landmark has has a z-dimension the offset in the image is adjusted: landmarks on the ground are aimed at differently from goals and corner posts | |
| void | getLookAtBallAngles (const Vector2< double > ballOnField, double &neckTilt, double &headPan, double &headTilt) |
| returns the angles that are good for looking at the ball | |
| void | setupMainAngles () |
| initial the main angles for the head movement | |
| void | calibrateHeadSpeed () |
| void | calibrationReset () |
| bool | headPositionReached (Vector3< double > pos) |
| int | getLastSeenBeaconIndex () |
| return the index of the last seen beacon | |
| long | getTimeOfLastSeenBeacon (int index) |
| return the time of the last seen beacon | |
| long | getTimeBetweenSeen2LastBeacons (int index) |
| return the time between the two last seen beacons | |
| bool | isTimedOut () |
| bool | calibrateHeadSpeedIsReady () |
| void | searchForBallLeft () |
| looks to the left/right side an aearch for ball. | |
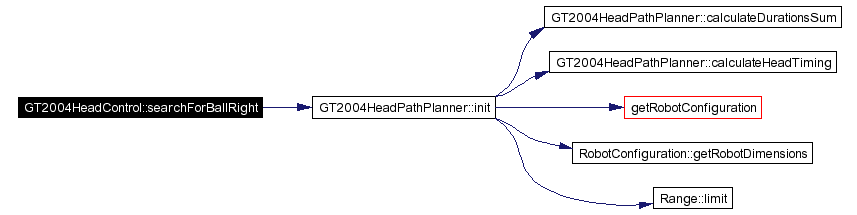
| void | searchForBallRight () |
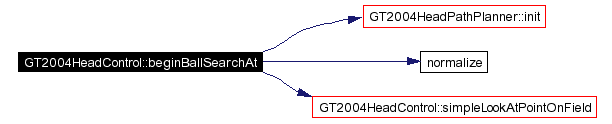
| void | beginBallSearchAt (Vector2< double > ballPosition2d) |
| begin a ball search by the given start position | |
Public Attributes | |
| GT2004HeadPathPlanner | headPathPlanner |
| An instance of the head path planner. | |
| bool | lastScanWasLeft |
| If true, the last head movement was directed to the left side (of the ball). | |
| HeadControlMode::HeadControlModes | lastHeadControlMode |
| The head control mode that was executed in the last frame. | |
| CameraInfo | cameraInfo |
| Information about the used camera. | |
| GT2004HeadControlSymbols | symbols |
| The symbols used by the Xabsl2Engine. | |
| GT2004HeadControlBasicBehaviors | basicBehaviors |
| The basic behaviors used by the Xabsl2Engine. | |
| int | setJointsIsCloseToDestination |
| stores the number of frames "setjoints" has been close to its destination | |
| bool | setJointsMaxPanReached |
| true if the max pan of the head joint is reached | |
| Vector3< double > | headLeft |
| basic headpositions for the gaze | |
| Vector3< double > | headRight |
| Vector3< double > | headMiddleLeft |
| Vector3< double > | headMiddleLeftDown |
| Vector3< double > | headMiddleRight |
| Vector3< double > | headMiddleRightDown |
| Vector3< double > | headRightDown |
| Vector3< double > | headLeftDown |
| Vector3< double > | headUp |
| Vector3< double > | headDown |
| double | speedNeckTilt |
| speed in rad/s for head movement. | |
| double | speedHeadPan |
| double | speedHeadTilt |
| bool | useCommunicatedBall |
| enum GT2004HeadControl:: { ... } | calibrationState |
| long | calibrationTime |
| int | calibrationTimeOutsTilt1 |
| int | calibrationTimeOutsPan |
| int | calibrationTimeOutsTilt2 |
| int | calibrationRoundCount |
| int | calibrationSuccessfulRounds |
Private Attributes | |
| Range< double > | jointRangeNeckTilt |
| Range< double > | jointRangeHeadPan |
| Range< double > | jointRangeHeadTilt |
| OdometryData | lastOdometryData |
| RobotPose | lastRobotPose |
Jan Hoffmann
Uwe Düffert
Martin Lötzsch
Definition at line 31 of file GT2004HeadControl.h.
|
|
The minimum head speed in urad per frame: 4000 = 28.6°/s.
Definition at line 84 of file GT2004HeadControl.h. |
|
|
Definition at line 168 of file GT2004HeadControl.h. |
|
Here is the call graph for this function:
|
|
Destructor.
Definition at line 41 of file GT2004HeadControl.h. |
|
|
Executes the module.
Implements Module. Definition at line 134 of file GT2004HeadControl.cpp. References SensorData::data, GTXabsl2EngineExecutor::executeEngine(), RobotState::getButtonDuration(), RobotState::getButtonPressed(), HeadControlMode::headControlMode, headPathPlanner, SensorDataBuffer::lastFrame(), lastHeadControlMode, GT2004HeadPathPlanner::lastHeadPan, GT2004HeadPathPlanner::lastHeadTilt, GT2004HeadPathPlanner::lastNeckTilt, GTXabsl2Profiler::profilerCollectMode, GTXabsl2Profiler::profilerWriteMode, symbols, and GT2004HeadControlSymbols::update(). |
Here is the call graph for this function:
|
|
Is called for every incoming debug message.
Reimplemented from Xabsl2HeadControl. Definition at line 173 of file GT2004HeadControl.cpp. References Xabsl2HeadControl::handleMessage(). |
Here is the call graph for this function:

|
|
Registers symbols and basic behaviors at the engine.
Implements GTXabsl2EngineExecutor. Definition at line 128 of file GT2004HeadControl.cpp. References GT2004HeadControlBasicBehaviors::registerBasicBehaviors(), GT2004HeadControlSymbols::registerSymbols(), and symbols. |
Here is the call graph for this function:

|
|
Is true, if the head is on the left side.
Definition at line 82 of file GT2004HeadControl.cpp. References SensorData::data, and SensorDataBuffer::lastFrame(). |
Here is the call graph for this function:

|
|
put the sensor values in var pos
Definition at line 87 of file GT2004HeadControl.cpp. References SensorData::data, SensorDataBuffer::lastFrame(), Vector3< V >::x, Vector3< V >::y, and Vector3< V >::z. |
Here is the call graph for this function:

|
||||||||||||
|
returns a distance between actual position and comp. the small results are better Definition at line 120 of file GT2004HeadControl.cpp. References SensorData::data, SensorDataBuffer::lastFrame(), and Vector3< V >::y. |
Here is the call graph for this function:

|
||||||||||||||||||||||||
|
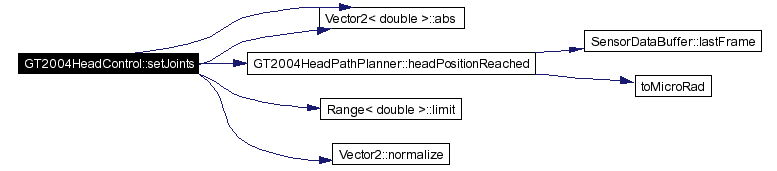
deals with setting the head joints and performs optimizations so that the head does not move too fast angles are in RAD and NOT EVER AGAIN(!!) IN MICRORAD!
Definition at line 243 of file GT2004HeadControl.cpp. References Vector2< double >::abs(), Vector2< V >::abs(), direction, headPathPlanner, GT2004HeadPathPlanner::headPositionReached(), jointRangeHeadPan, jointRangeHeadTilt, jointRangeNeckTilt, GT2004HeadPathPlanner::lastHeadPan, GT2004HeadPathPlanner::lastHeadTilt, GT2004HeadPathPlanner::lastNeckTilt, lastOdometryData, Range< double >::limit(), Range< double >::max, HeadMotionRequest::mouth, Vector2< V >::normalize(), HeadMotionRequest::pan, HeadMotionRequest::roll, setJointsIsCloseToDestination, setJointsMaxPanReached, HeadMotionRequest::tilt, Vector2< double >::x, and Vector2< double >::y. Referenced by GT2004BasicBehaviorDirectedScanForLandmarks::execute(). |
Here is the call graph for this function:
|
||||||||||||||||||||
|
Definition at line 231 of file GT2004HeadControl.cpp. References headPathPlanner, jointRangeHeadPan, jointRangeHeadTilt, jointRangeNeckTilt, GT2004HeadPathPlanner::lastHeadPan, GT2004HeadPathPlanner::lastHeadTilt, GT2004HeadPathPlanner::lastNeckTilt, Range< double >::limit(), HeadMotionRequest::mouth, HeadMotionRequest::pan, HeadMotionRequest::roll, HeadMotionRequest::tilt, and toMicroRad(). |
Here is the call graph for this function:

|
||||||||||||||||||||||||
|
Definition at line 341 of file GT2004HeadControl.cpp. References BodyPosture::bodyRollCalculatedFromLegSensors, BodyPosture::bodyTiltCalculatedFromLegSensors, jointRangeHeadPan, jointRangeHeadTilt, jointRangeNeckTilt, Range< T >::limit(), BodyPosture::neckHeightCalculatedFromLegSensors, CameraInfo::openingAngleHeight, CameraInfo::openingAngleWidth, CameraInfo::resolutionHeight, CameraInfo::resolutionWidth, RotationMatrix::rotateY(), simpleLookAtPointFixNeckTilt(), Vector2< V >::x, Vector2< V >::y, and Vector3< V >::z. Referenced by getLookAtBallAngles(), and simpleLookAtPointOnField(). |
Here is the call graph for this function:

|
||||||||||||||||||||||||
|
Simplified "look at 3d-point" on field with offset point in camera image this is straight-forward for the ERS210, but the ERS7 has two tilt joints that can both be used to look at something. Lookatpoint uses the two following methods to find a 'good' solution. transform the targets position to the robot's "coord. system": transform from world to relative coordinates what about the order of the rotations? rotate by the body's rotation(s) Definition at line 393 of file GT2004HeadControl.cpp. References Pose2D::getAngle(), RotationMatrix::rotateZ(), simpleLookAtPointRelativeToRobot(), Pose2D::translation, Vector2< double >::x, Vector3< V >::x, Vector2< double >::y, and Vector3< V >::y. Referenced by aimAtLandmark(), and beginBallSearchAt(). |
Here is the call graph for this function:

|
||||||||||||||||||||
|
Simplified "look at 3d-point" subroutine trying to find tilt1 solution for given tilt2/roll. this is useful on ERS210 and ERS7
transformation from "neck-coord" into cam. coord., i.e. translation by distanceNeckToPanCenter a rotation by the neck-joint Angle followed by get the pan angle from looking at where the target is in the xy plane never mind clipping: if (headPan>=pi) headPan -= pi2; else if (headPan<-pi) headPan += pi2; perform (pan-) rotation on target get the headTilt angle by taking the angle to the target in the XZ-Plane again, no clipping: if (headTilt >= pi) headTilt -= pi2; else if (headTilt < -pi) headTilt += pi2; For debugging: Rotate camera coord. system by the tilt just found. If everything was done correctly, target should have y = z = 0.0 RotationMatrix rotationByHeadTilt; rotationByHeadTilt.rotateY(headTilt); target = rotationByHeadTilt*target; if values are our of bounds, return 0 so a different method can be applied! Definition at line 410 of file GT2004HeadControl.cpp. References RotationMatrix::rotateY(), RotationMatrix::rotateZ(), and Vector3< V >::z. Referenced by simpleLookAtPointRelativeToRobot(). |
Here is the call graph for this function:

|
||||||||||||||||||||||||
|
look at 3d-point on field with offset point in camera image this is straight-forward for the ERS210, but the ERS7 has two tilt joints that can both be used to look at something. Lookatpoint uses the two following methods to find a 'good' solution. |
|
||||||||||||||||||||||||||||
|
look at 3d-point subroutine trying to find tilt1 solution for given tilt2/roll. this is useful on ERS210 and ERS7
|
|
||||||||||||||||||||||||||||
|
look at 3d-point subroutine trying to find tilt2 solution for given tilt1. this is only useful on ERS7
|
|
||||||||||||
|
return the closest landmark w.r.t. a given direction; also, the next landmark to the left (or right) can be calculated. Definition at line 439 of file GT2004HeadControl.cpp. References Vector2< V >::abs(), Vector2< V >::angle(), CIRCLE, LINE, normalize(), Pose2D::rotation, sgn, Pose2D::translation, Vector2< double >::x, and Vector2< double >::y. Referenced by GT2004BasicBehaviorDirectedScanForLandmarks::execute(). |
Here is the call graph for this function:

|
||||||||||||||||||||
|
call look-at-point depending on whether the landmark has has a z-dimension the offset in the image is adjusted: landmarks on the ground are aimed at differently from goals and corner posts
Definition at line 302 of file GT2004HeadControl.cpp. References CameraInfo::resolutionHeight, and simpleLookAtPointOnField(). Referenced by GT2004BasicBehaviorDirectedScanForLandmarks::execute(). |
Here is the call graph for this function:

|
||||||||||||||||||||
|
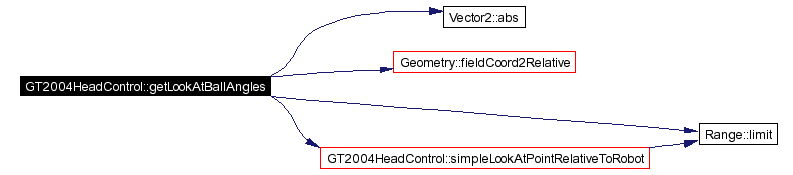
returns the angles that are good for looking at the ball
Definition at line 322 of file GT2004HeadControl.cpp. References Vector2< V >::abs(), Geometry::fieldCoord2Relative(), Range< T >::limit(), CameraInfo::resolutionHeight, simpleLookAtPointRelativeToRobot(), Vector2< V >::x, and Vector2< V >::y. |
Here is the call graph for this function:
|
|
initial the main angles for the head movement
Definition at line 490 of file GT2004HeadControl.cpp. References headDown, headLeftDown, headMiddleLeft, headMiddleLeftDown, headMiddleRight, headMiddleRightDown, headRightDown, headUp, Vector3< double >::x, Vector3< double >::y, and Vector3< double >::z. Referenced by GT2004HeadControl(). |
|
|
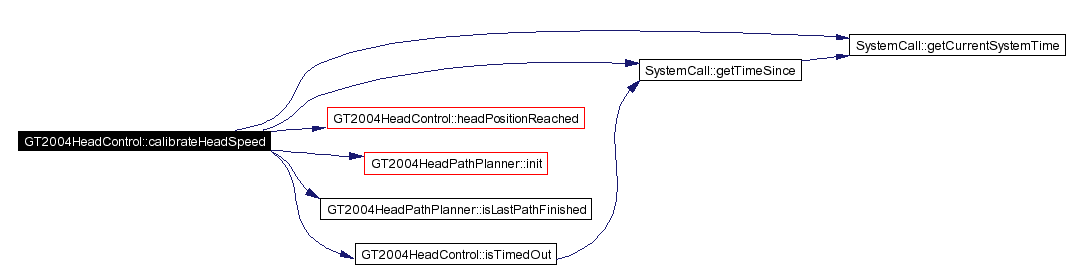
Definition at line 534 of file GT2004HeadControl.cpp. References calibrationRoundCount, calibrationState, calibrationStateDownTilt1, calibrationStateDownTilt1Wait, calibrationStateDownTilt2, calibrationStateDownTilt2Wait, calibrationStateLeft, calibrationStateLeftWait, calibrationStateReady, calibrationStateRight, calibrationStateRightWait, calibrationStateStart, calibrationStateUpTilt1, calibrationStateUpTilt1Wait, calibrationStateUpTilt2, calibrationStateUpTilt2Wait, calibrationStateUseResults, calibrationSuccessfulRounds, calibrationTime, calibrationTimeOutsPan, calibrationTimeOutsTilt1, calibrationTimeOutsTilt2, SystemCall::getCurrentSystemTime(), SystemCall::getTimeSince(), headPathPlanner, GT2004HeadPathPlanner::headPathSpeedHeadPan, GT2004HeadPathPlanner::headPathSpeedHeadTilt, GT2004HeadPathPlanner::headPathSpeedNeckTilt, headPositionReached(), headUp, idText, GT2004HeadPathPlanner::init(), GT2004HeadPathPlanner::isLastPathFinished(), isTimedOut(), OUTPUT, speedHeadPan, speedHeadTilt, speedNeckTilt, Vector3< V >::x, Vector3< V >::y, and Vector3< V >::z. |
Here is the call graph for this function:
|
|
Definition at line 191 of file GT2004HeadControl.h. References calibrationState, calibrationStateStart, calibrationTimeOutsPan, calibrationTimeOutsTilt1, and calibrationTimeOutsTilt2. Referenced by GT2004HeadControl(). |
|
|
Definition at line 199 of file GT2004HeadControl.h. References headPathPlanner, and GT2004HeadPathPlanner::headPositionReached(). Referenced by calibrateHeadSpeed(). |
Here is the call graph for this function:

|
|
return the index of the last seen beacon
Definition at line 68 of file GT2004HeadControl.cpp. References LandmarksState::lastSeenBeaconIndex(). Referenced by GT2004HeadControlSymbols::update(). |
Here is the call graph for this function:

|
|
return the time of the last seen beacon
Definition at line 72 of file GT2004HeadControl.cpp. References LandmarksState::timeOfLastSeenBeacon(). Referenced by GT2004HeadControlSymbols::getTimeSinceLastSeenABeacon(). |
Here is the call graph for this function:

|
|
return the time between the two last seen beacons
Definition at line 77 of file GT2004HeadControl.cpp. References LandmarksState::timeBetweenSeen2LastBeacons(). Referenced by GT2004HeadControlSymbols::getTimeBetweenSeen2LastBeacons(). |
Here is the call graph for this function:

|
|
Definition at line 214 of file GT2004HeadControl.h. References calibrationTime, and SystemCall::getTimeSince(). Referenced by calibrateHeadSpeed(). |
Here is the call graph for this function:

|
|
Definition at line 219 of file GT2004HeadControl.h. References calibrationState, and calibrationStateReady. |
|
|
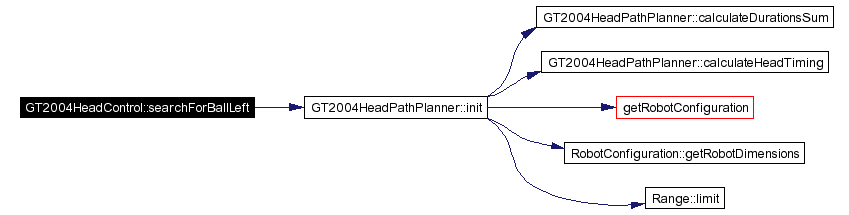
looks to the left/right side an aearch for ball. Used for kicks Definition at line 107 of file GT2004HeadControl.cpp. References headDown, headMiddleLeft, headPathPlanner, GT2004HeadPathPlanner::init(), and lastScanWasLeft. |
Here is the call graph for this function:
|
|
Definition at line 94 of file GT2004HeadControl.cpp. References headDown, headMiddleRight, headPathPlanner, GT2004HeadPathPlanner::init(), and lastScanWasLeft. |
Here is the call graph for this function:
|
|
begin a ball search by the given start position
Definition at line 179 of file GT2004HeadControl.cpp. References headDown, headLeftDown, headMiddleLeft, headMiddleLeftDown, headMiddleRight, headMiddleRightDown, headPathPlanner, headRightDown, headUp, GT2004HeadPathPlanner::init(), lastScanWasLeft, normalize(), Pose2D::rotation, simpleLookAtPointOnField(), Pose2D::translation, Vector2< V >::x, and Vector2< V >::y. |
Here is the call graph for this function:
|
|
An instance of the head path planner.
Definition at line 57 of file GT2004HeadControl.h. Referenced by beginBallSearchAt(), calibrateHeadSpeed(), execute(), GT2004HeadControlSymbols::getLastHeadPathIsFinished(), GT2004HeadControl(), headPositionReached(), searchForBallLeft(), searchForBallRight(), setJoints(), and setJointsDirect(). |
|
|
If true, the last head movement was directed to the left side (of the ball).
Definition at line 60 of file GT2004HeadControl.h. Referenced by beginBallSearchAt(), searchForBallLeft(), and searchForBallRight(). |
|
|
The head control mode that was executed in the last frame.
Definition at line 72 of file GT2004HeadControl.h. Referenced by execute(). |
|
|
Information about the used camera.
Definition at line 75 of file GT2004HeadControl.h. |
|
|
The symbols used by the Xabsl2Engine.
Definition at line 78 of file GT2004HeadControl.h. Referenced by execute(), and registerSymbolsAndBasicBehaviors(). |
|
|
The basic behaviors used by the Xabsl2Engine.
Definition at line 81 of file GT2004HeadControl.h. |
|
|
stores the number of frames "setjoints" has been close to its destination
Definition at line 134 of file GT2004HeadControl.h. Referenced by GT2004HeadControlSymbols::getSetJointsIsCloseToDestination(), and setJoints(). |
|
|
true if the max pan of the head joint is reached
Definition at line 137 of file GT2004HeadControl.h. Referenced by GT2004HeadControlSymbols::getSetJointsMaxPanReached(), and setJoints(). |
|
|
basic headpositions for the gaze
Definition at line 144 of file GT2004HeadControl.h. |
|
|
Definition at line 145 of file GT2004HeadControl.h. |
|
|
Definition at line 146 of file GT2004HeadControl.h. Referenced by beginBallSearchAt(), searchForBallLeft(), and setupMainAngles(). |
|
|
Definition at line 147 of file GT2004HeadControl.h. Referenced by beginBallSearchAt(), and setupMainAngles(). |
|
|
Definition at line 148 of file GT2004HeadControl.h. Referenced by beginBallSearchAt(), searchForBallRight(), and setupMainAngles(). |
|
|
Definition at line 149 of file GT2004HeadControl.h. Referenced by beginBallSearchAt(), and setupMainAngles(). |
|
|
Definition at line 150 of file GT2004HeadControl.h. Referenced by beginBallSearchAt(), and setupMainAngles(). |
|
|
Definition at line 151 of file GT2004HeadControl.h. Referenced by beginBallSearchAt(), and setupMainAngles(). |
|
|
Definition at line 152 of file GT2004HeadControl.h. Referenced by beginBallSearchAt(), calibrateHeadSpeed(), and setupMainAngles(). |
|
|
Definition at line 153 of file GT2004HeadControl.h. Referenced by beginBallSearchAt(), searchForBallLeft(), searchForBallRight(), and setupMainAngles(). |
|
|
speed in rad/s for head movement. its used for headpathplanner and the calibration Definition at line 156 of file GT2004HeadControl.h. Referenced by calibrateHeadSpeed(), and GT2004HeadControl(). |
|
|
Definition at line 157 of file GT2004HeadControl.h. Referenced by calibrateHeadSpeed(), and GT2004HeadControl(). |
|
|
Definition at line 158 of file GT2004HeadControl.h. Referenced by calibrateHeadSpeed(), and GT2004HeadControl(). |
|
|
Definition at line 166 of file GT2004HeadControl.h. Referenced by GT2004HeadControl(). |
|
|
Referenced by calibrateHeadSpeed(), calibrateHeadSpeedIsReady(), and calibrationReset(). |
|
|
Definition at line 187 of file GT2004HeadControl.h. Referenced by calibrateHeadSpeed(), and isTimedOut(). |
|
|
Definition at line 188 of file GT2004HeadControl.h. Referenced by calibrateHeadSpeed(), and calibrationReset(). |
|
|
Definition at line 188 of file GT2004HeadControl.h. Referenced by calibrateHeadSpeed(), and calibrationReset(). |
|
|
Definition at line 188 of file GT2004HeadControl.h. Referenced by calibrateHeadSpeed(), and calibrationReset(). |
|
|
Definition at line 189 of file GT2004HeadControl.h. Referenced by calibrateHeadSpeed(). |
|
|
Definition at line 189 of file GT2004HeadControl.h. Referenced by calibrateHeadSpeed(). |
|
|
Definition at line 232 of file GT2004HeadControl.h. Referenced by GT2004HeadControl(), setJoints(), setJointsDirect(), and simpleLookAtPointRelativeToRobot(). |
|
|
Definition at line 232 of file GT2004HeadControl.h. Referenced by GT2004HeadControl(), setJoints(), setJointsDirect(), and simpleLookAtPointRelativeToRobot(). |
|
|
Definition at line 232 of file GT2004HeadControl.h. Referenced by GT2004HeadControl(), setJoints(), setJointsDirect(), and simpleLookAtPointRelativeToRobot(). |
|
|
Definition at line 235 of file GT2004HeadControl.h. Referenced by setJoints(). |
|
|
Definition at line 236 of file GT2004HeadControl.h. |
 1.3.6
1.3.6