#include <HeadControl.h>
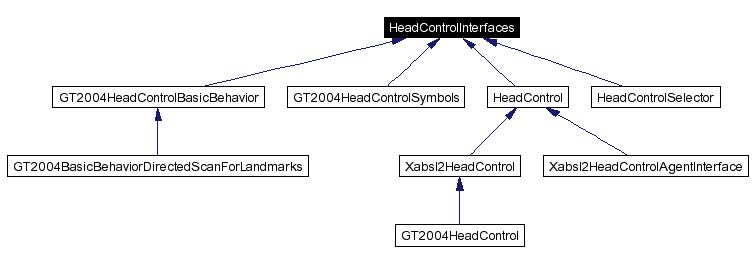
Inheritance diagram for HeadControlInterfaces:
Public Member Functions | |
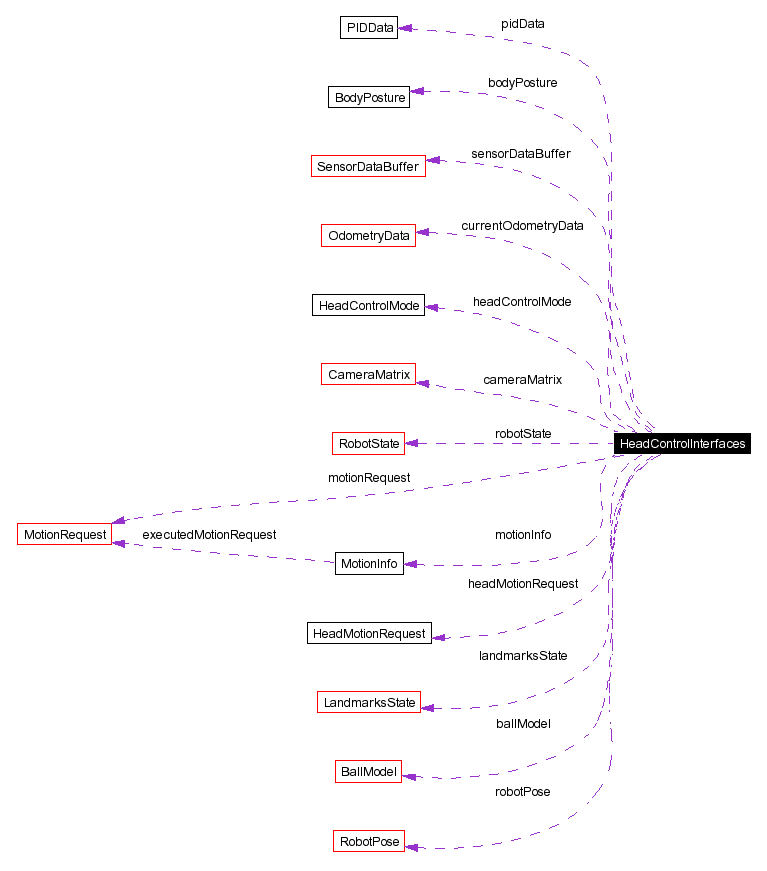
| HeadControlInterfaces (const unsigned long &frameNumber, const SensorDataBuffer &sensorDataBuffer, const CameraMatrix &cameraMatrix, const OdometryData ¤tOdometryData, const BodyPosture &bodyPosture, const BallModel &ballModel, const RobotPose &robotPose, const LandmarksState &landmarksState, const RobotState &robotState, const MotionInfo &motionInfo, const HeadControlMode &headControlMode, const bool headIsBlockedBySpecialActionOrWalk, HeadMotionRequest &headMotionRequest, PIDData &pidData) | |
| Constructor. | |
Protected Attributes | |
| const unsigned long & | frameNumber |
| A reference to the frame number. | |
| const HeadControlMode & | headControlMode |
| A modus from the behavior how to move the head. | |
| const RobotPose & | robotPose |
| The robots current position and orientation. | |
| const CameraMatrix & | cameraMatrix |
| The position and rotation of the camera relative to the robot. | |
| const OdometryData & | currentOdometryData |
| The odometry of the last Motion frame. | |
| const BallModel & | ballModel |
| The position and the speed of the ball. | |
| const SensorDataBuffer & | sensorDataBuffer |
| The current body sensor data. | |
| const BodyPosture & | bodyPosture |
| The neck height and body tilt. | |
| const MotionRequest & | motionRequest |
| motionRequest that is currently executed | |
| const MotionInfo & | motionInfo |
| information about the executed motions | |
| const LandmarksState & | landmarksState |
| the currently seen landmarks | |
| const RobotState & | robotState |
| The current state of the robot. | |
| const bool | headIsBlockedBySpecialActionOrWalk |
| Specifies if the head is blocked by a special action or walk. | |
| HeadMotionRequest & | headMotionRequest |
| Head joint angles that have to be set. | |
| PIDData & | pidData |
| PID servo gains. | |
Definition at line 49 of file HeadControl.h.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Constructor.
Definition at line 53 of file HeadControl.h. |
|
|
A reference to the frame number.
Definition at line 88 of file HeadControl.h. |
|
|
A modus from the behavior how to move the head.
Definition at line 91 of file HeadControl.h. |
|
|
The robots current position and orientation.
Definition at line 94 of file HeadControl.h. |
|
|
The position and rotation of the camera relative to the robot.
Definition at line 97 of file HeadControl.h. |
|
|
The odometry of the last Motion frame.
Definition at line 100 of file HeadControl.h. |
|
|
The position and the speed of the ball.
Definition at line 103 of file HeadControl.h. |
|
|
The current body sensor data.
Definition at line 106 of file HeadControl.h. |
|
|
The neck height and body tilt.
Definition at line 109 of file HeadControl.h. |
|
|
motionRequest that is currently executed
Definition at line 112 of file HeadControl.h. |
|
|
information about the executed motions
Definition at line 115 of file HeadControl.h. |
|
|
the currently seen landmarks
Definition at line 118 of file HeadControl.h. |
|
|
The current state of the robot.
Definition at line 121 of file HeadControl.h. |
|
|
Specifies if the head is blocked by a special action or walk.
Definition at line 124 of file HeadControl.h. |
|
|
Head joint angles that have to be set.
Definition at line 127 of file HeadControl.h. |
|
|
PID servo gains.
Definition at line 130 of file HeadControl.h. |
 1.3.6
1.3.6