#include "Tools/Math/Geometry.h"
#include "Tools/Math/Vector2.h"
#include "Tools/ColorClasses.h"
Include dependency graph for SegmentationTools.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | listed |
| implementation of slist : all the objects to be listed must derive from the template class "listed" (use the name of the class as template parameter for normal use) More... | |
| class | slist |
| class | slist::iterator |
| struct | figure |
| definition of an edge and a linePair : very convenient for mixing both in a list. More... | |
| class | edge |
| struct | LinePair |
| class | horLinePair |
| struct | extLinePair |
| struct | LinePair2 |
| class | LinePair3 |
| struct | coloredLinePair2 |
Typedefs | |
| typedef Vector2< int > | point |
| typedef Vector2< double > | direction |
Functions | |
| point | mil (point &v1, point &v2) |
| geometrical stuff | |
| double | theta2 (point v1, point v2) |
| double | AngleRelativeToHorizontal (const point &pt1, const point &pt2) |
| same principle as theta2, but using trigonoetric functions (also more time consuming) | |
| double | theta2 (LinePair2 *l1, LinePair2 *l2) |
| figure * | getMin (figure *lp) |
| finds the nearest point starting from lp | |
| void | createLinearSegment (slist< figure > &lst) |
| join the nearest LinePairs in order to make the interpretation of the shape possible | |
| Vector2< double > | mil (LinePair2 &lp) |
| Geometry::Line | makeLine (LinePair2 *lp) |
Definition in file SegmentationTools.h.
|
|
|
Definition at line 25 of file SegmentationTools.h. Referenced by extLinePair::getDirection(), horLinePair::getDirection(), Geometry::Line::Line(), Geometry::Line::normalizeDirection(), and GT2004HeadControl::setJoints(). |
|
||||||||||||
|
geometrical stuff
Definition at line 34 of file SegmentationTools.h. References point, Vector2< V >::x, and Vector2< V >::y. |
|
||||||||||||
|
Gives a number between 0 and 360 with the same order as v.angle() Definition at line 41 of file SegmentationTools.h. References Vector2< V >::x, and Vector2< V >::y. |
|
||||||||||||
|
same principle as theta2, but using trigonoetric functions (also more time consuming)
Definition at line 61 of file SegmentationTools.h. References Vector2< V >::x. |
|
||||||||||||
|
calculate the angle between two lines using theta2 Definition at line 428 of file SegmentationTools.h. References LinePair2::p1, and LinePair2::p2. Referenced by RFieldSpecialist::analyzeLines(), RFieldSpecialist::checkRamp(), RFieldSpecialist::fusionLines(), and RFieldSpecialist::makeLines(). |
|
|
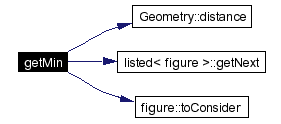
finds the nearest point starting from lp
Definition at line 449 of file SegmentationTools.h. References Geometry::distance(), listed< figure >::getNext(), min, and figure::toConsider(). Referenced by createLinearSegment(). |
Here is the call graph for this function:
|
|
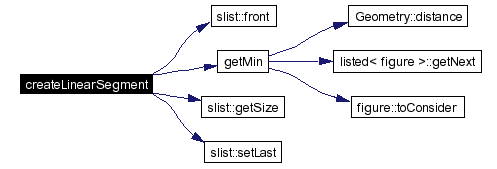
join the nearest LinePairs in order to make the interpretation of the shape possible
Definition at line 484 of file SegmentationTools.h. References slist< T >::front(), getMin(), slist< T >::getSize(), min, and slist< T >::setLast(). Referenced by RFieldSpecialist::executePostProcessing(). |
Here is the call graph for this function:
|
|
Definition at line 501 of file SegmentationTools.h. References LinePair2::p1, LinePair2::p2, Vector2< V >::x, and Vector2< V >::y. Referenced by RFieldSpecialist::fusionLines(), and extLinePair::toConsider(). |
|
|
transform a line pair into a line defined into the Geometry library Definition at line 506 of file SegmentationTools.h. References Geometry::Line::base, Geometry::Line::direction, LinePair2::p1, LinePair2::p2, Vector2< V >::x, and Vector2< V >::y. Referenced by RFieldSpecialist::analyzeLines(), and RFieldSpecialist::fusionLines(). |
 1.3.6
1.3.6