#include <MotionControl.h>
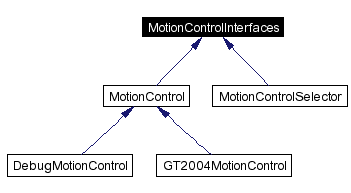
Inheritance diagram for MotionControlInterfaces:
Public Member Functions | |
| MotionControlInterfaces (const unsigned long &frameNumber, const MotionRequest &motionRequest, const HeadMotionRequest &headMotionRequest, const SensorDataBuffer &sensorDataBuffer, const BodyPosture &bodyPosture, const InvKinWalkingParameters &invKinWalkingParameters, const GT2004Parameters >2004Parameters, const unsigned long &walkParameterTimeStamp, const bool &receivedNewSensorData, JointDataBuffer &jointDataBuffer, PIDData &pidData, OdometryData &odometryData, MotionInfo &motionInfo, bool headIsBlockedBySpecialActionOrWalk) | |
| Constructor. | |
Protected Attributes | |
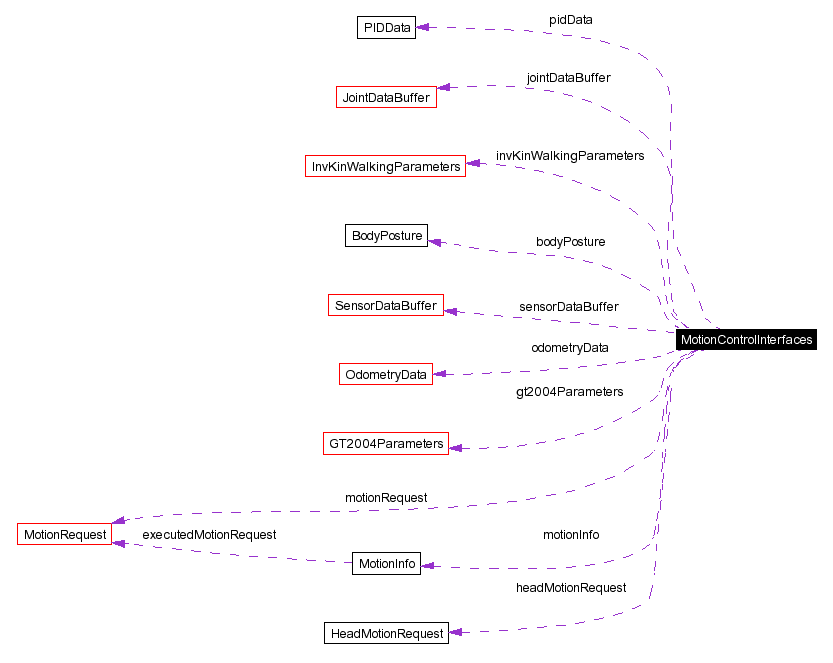
| const unsigned long & | frameNumber |
| A reference to the frame number. | |
| const MotionRequest & | motionRequest |
| A request from the behavior control. | |
| const HeadMotionRequest & | headMotionRequest |
| Head joint values from the head control. | |
| const SensorDataBuffer & | sensorDataBuffer |
| The current body sensor data. | |
| const BodyPosture & | bodyPosture |
| The current body posture. | |
| const InvKinWalkingParameters & | invKinWalkingParameters |
| walking parameter sets to be used by the WalkingEngine, eg calculated by evolution behavior | |
| const GT2004Parameters & | gt2004Parameters |
| const unsigned long & | walkParameterTimeStamp |
| const bool & | receivedNewSensorData |
| Indicates that the Motion Process received a new SensorDataBuffer. | |
| JointDataBuffer & | jointDataBuffer |
| A buffer of joint data to be filled. | |
| PIDData & | pidData |
| The current PID servo gains. | |
| OdometryData & | odometryData |
| The odometry to be incremented. | |
| MotionInfo & | motionInfo |
| The height of the neck and the body tilt to be calculated. | |
| bool | headIsBlockedBySpecialActionOrWalk |
| Specifies if the head is blocked by a special action or walk. | |
Definition at line 34 of file MotionControl.h.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Constructor.
Definition at line 38 of file MotionControl.h. |
|
|
A reference to the frame number.
Definition at line 72 of file MotionControl.h. |
|
|
A request from the behavior control.
Definition at line 75 of file MotionControl.h. |
|
|
Head joint values from the head control.
Definition at line 78 of file MotionControl.h. |
|
|
The current body sensor data.
Definition at line 81 of file MotionControl.h. |
|
|
The current body posture.
Definition at line 84 of file MotionControl.h. |
|
|
walking parameter sets to be used by the WalkingEngine, eg calculated by evolution behavior
Definition at line 87 of file MotionControl.h. |
|
|
Definition at line 88 of file MotionControl.h. |
|
|
Definition at line 89 of file MotionControl.h. |
|
|
Indicates that the Motion Process received a new SensorDataBuffer.
Definition at line 92 of file MotionControl.h. |
|
|
A buffer of joint data to be filled.
Definition at line 95 of file MotionControl.h. |
|
|
The current PID servo gains.
Definition at line 98 of file MotionControl.h. |
|
|
The odometry to be incremented.
Definition at line 101 of file MotionControl.h. |
|
|
The height of the neck and the body tilt to be calculated.
Definition at line 104 of file MotionControl.h. |
|
|
Specifies if the head is blocked by a special action or walk.
Definition at line 107 of file MotionControl.h. |
 1.3.6
1.3.6