#include <GT2004SensorDataProcessor.h>
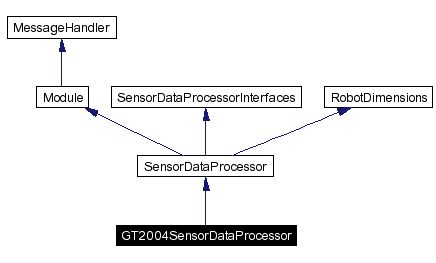
Inheritance diagram for GT2004SensorDataProcessor:
Public Member Functions | |
| GT2004SensorDataProcessor (const SensorDataProcessorInterfaces &interfaces) | |
| Constructor. | |
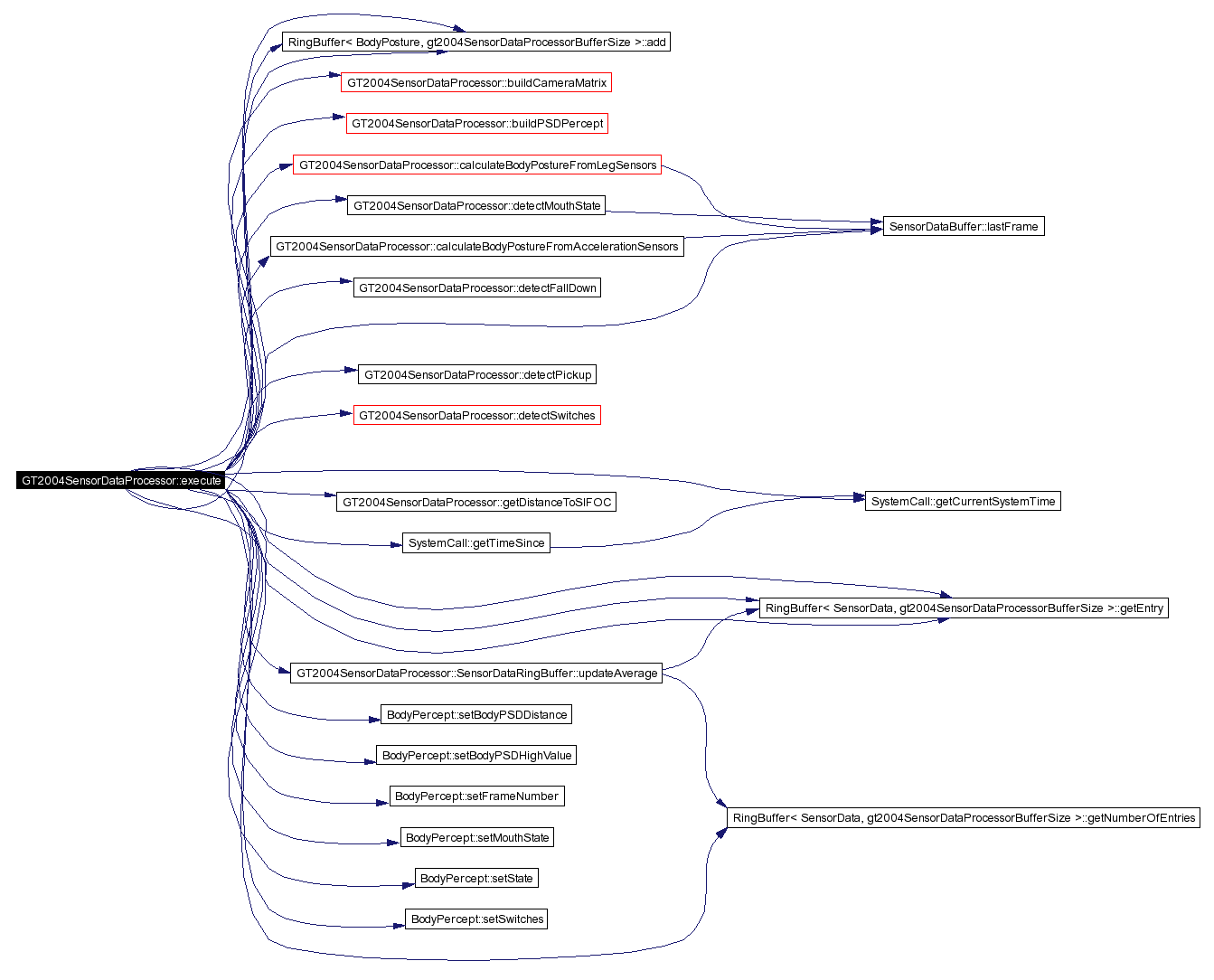
| virtual void | execute () |
| Executes the module. | |
| double | getCameraVelocity () |
| Returns the angle speed of the camera [degrees/second]. | |
| double | getCameraVelocity (const SensorData::sensors joint) |
| double | getDistanceToSIFOC () |
| Calculates the distance to objects in front of the bodyPSD. | |
Protected Member Functions | |
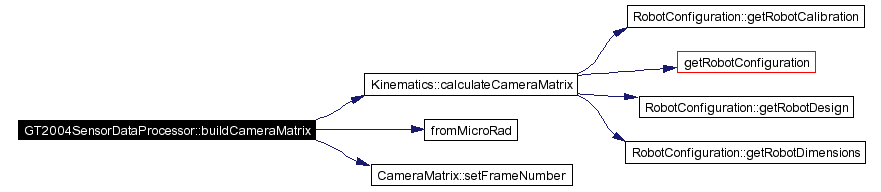
| virtual void | buildCameraMatrix (const SensorData &sensorData, const BodyPosture &bP, CameraMatrix &cameraMatrix) |
| calculates the offset and the rotation of the camera matrix | |
| virtual bool | detectFallDown () |
| detects whether the robot fell down. | |
Protected Attributes | |
| Vector3< double > | gravity |
| current averaged values from acceleration sensors, longer period for gravity | |
Private Member Functions | |
| void | buildPSDPercept (const SensorData &sensorData, const CameraMatrix &cameraMatrix, SinglePSDPercept &psdPercept) |
| calculates a spot relative to the robot that was detected by the PSD sensor | |
| int | detectSwitches () |
| BodyPercept::MouthStates | detectMouthState () |
| bool | detectPickup (const Vector3< double > &gravity, const Vector3< double > &acceleration) |
| void | calculateBodyPostureFromLegSensors (const SensorData &sensorData, BodyPosture &bP) |
| void | calculateBodyPostureFromAccelerationSensors (const SensorData &sensorData, BodyPosture &bP) |
Private Attributes | |
| unsigned long | tempSysTime |
| Vector3< double > | accelerationWithGrav |
| current averaged values from acceleration sensors, shorter period for acceleration | |
| unsigned long | lastImageFrameNumber |
| The frame number of the last received image. | |
| double | previousAverage [3] |
| The average neck tilt, head pan and tilt of the robot (used in this order). | |
| double | actAverage [3] |
| The average neck tilt, head pan and tilt of the robot (used in this order). | |
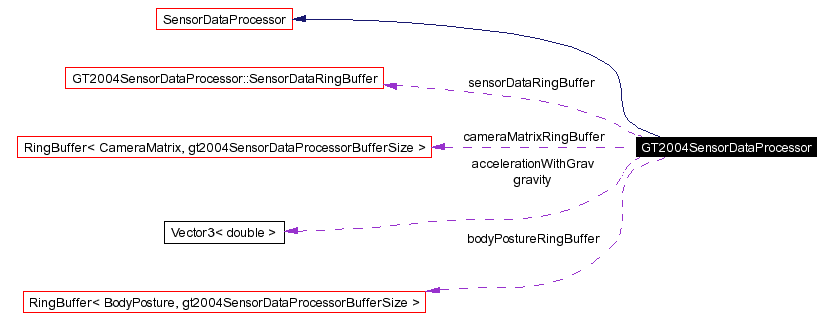
| SensorDataRingBuffer | sensorDataRingBuffer |
| RingBuffer< CameraMatrix, gt2004SensorDataProcessorBufferSize > | cameraMatrixRingBuffer |
| RingBuffer< BodyPosture, gt2004SensorDataProcessorBufferSize > | bodyPostureRingBuffer |
| unsigned long | leftRollStartTime |
| unsigned long | rightRollStartTime |
Definition at line 28 of file GT2004SensorDataProcessor.h.
|
|
Constructor.
Definition at line 16 of file GT2004SensorDataProcessor.cpp. |
|
Here is the call graph for this function:
|
|
Returns the angle speed of the camera [degrees/second].
Definition at line 41 of file GT2004SensorDataProcessor.h. |
|
|
Definition at line 309 of file GT2004SensorDataProcessor.cpp. References actAverage, fromMicroRad(), previousAverage, sensorDataRingBuffer, toDegrees(), and GT2004SensorDataProcessor::SensorDataRingBuffer::updateAverage(). |
Here is the call graph for this function:

|
|
Calculates the distance to objects in front of the bodyPSD.
Definition at line 339 of file GT2004SensorDataProcessor.cpp. References PSDPercept::numOfPercepts. Referenced by execute(). |
|
||||||||||||||||
|
calculates the offset and the rotation of the camera matrix
Definition at line 152 of file GT2004SensorDataProcessor.cpp. References BodyPosture::bodyTiltCalculatedFromLegSensors, Kinematics::calculateCameraMatrix(), SensorData::data, SensorData::frameNumber, fromMicroRad(), CameraMatrix::isValid, MotionInfo::motionIsStable, BodyPosture::neckHeightCalculatedFromLegSensors, and CameraMatrix::setFrameNumber(). Referenced by execute(). |
Here is the call graph for this function:
|
|
detects whether the robot fell down.
Definition at line 218 of file GT2004SensorDataProcessor.cpp. References gravity, gt2004SensorDataProcessorFalldownRollAngle, gt2004SensorDataProcessorFalldownTiltAngle, Vector3< double >::x, Vector3< double >::y, and Vector3< double >::z. Referenced by execute(). |
|
||||||||||||||||
|
calculates a spot relative to the robot that was detected by the PSD sensor
Definition at line 163 of file GT2004SensorDataProcessor.cpp. References SinglePSDPercept::body, SensorData::data, SensorData::frameNumber, fromMicroRad(), CameraMatrix::isValid, SinglePSDPercept::isValid, SinglePSDPercept::neckTilt, Pose3D::rotation, SinglePSDPercept::setFrameNumber(), SinglePSDPercept::tooFarAway, Pose3D::translation, Vector3< V >::x, Vector3< V >::y, and Vector3< V >::z. Referenced by execute(). |
Here is the call graph for this function:

|
|
Definition at line 201 of file GT2004SensorDataProcessor.cpp. References SensorData::data, SensorDataBuffer::frame, GT2004SensorDataProcessor::SensorDataRingBuffer::getAverage(), and sensorDataRingBuffer. Referenced by execute(). |
Here is the call graph for this function:

|
|
Definition at line 238 of file GT2004SensorDataProcessor.cpp. References SensorData::data, and SensorDataBuffer::lastFrame(). Referenced by execute(). |
Here is the call graph for this function:

|
||||||||||||
|
Definition at line 230 of file GT2004SensorDataProcessor.cpp. Referenced by execute(). |
|
||||||||||||
Here is the call graph for this function:

|
||||||||||||
|
Definition at line 299 of file GT2004SensorDataProcessor.cpp. References BodyPosture::bodyRollCalculatedFromAccelerationSensors, BodyPosture::bodyTiltCalculatedFromAccelerationSensors, SensorData::data, and SensorDataBuffer::lastFrame(). Referenced by execute(). |
Here is the call graph for this function:

|
|
current averaged values from acceleration sensors, longer period for gravity
Definition at line 58 of file GT2004SensorDataProcessor.h. Referenced by detectFallDown(), and execute(). |
|
|
Definition at line 61 of file GT2004SensorDataProcessor.h. |
|
|
current averaged values from acceleration sensors, shorter period for acceleration
Definition at line 65 of file GT2004SensorDataProcessor.h. Referenced by execute(). |
|
|
The frame number of the last received image.
Definition at line 76 of file GT2004SensorDataProcessor.h. Referenced by execute(). |
|
|
The average neck tilt, head pan and tilt of the robot (used in this order).
Definition at line 79 of file GT2004SensorDataProcessor.h. Referenced by getCameraVelocity(). |
|
|
The average neck tilt, head pan and tilt of the robot (used in this order).
Definition at line 79 of file GT2004SensorDataProcessor.h. Referenced by getCameraVelocity(). |
|
|
Definition at line 102 of file GT2004SensorDataProcessor.h. Referenced by detectSwitches(), execute(), and getCameraVelocity(). |
|
|
Definition at line 103 of file GT2004SensorDataProcessor.h. Referenced by execute(). |
|
|
Definition at line 104 of file GT2004SensorDataProcessor.h. Referenced by execute(). |
|
|
Definition at line 105 of file GT2004SensorDataProcessor.h. Referenced by execute(). |
|
|
Definition at line 106 of file GT2004SensorDataProcessor.h. Referenced by execute(). |
 1.3.6
1.3.6