#include <DebugMotionControl.h>
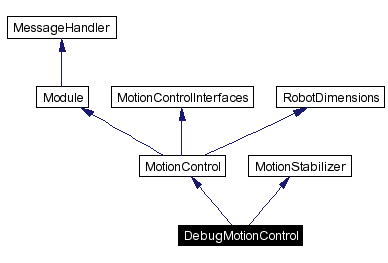
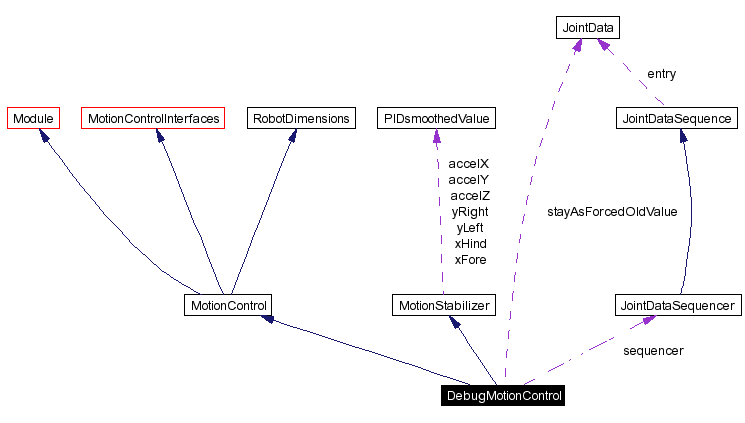
Inheritance diagram for DebugMotionControl:
Public Member Functions | |
| DebugMotionControl (const MotionControlInterfaces &interfaces) | |
| Constructor. | |
| virtual void | execute () |
| Executes the module. | |
| virtual bool | handleMessage (InMessage &message) |
| Called from a MessageQueue to distribute messages. | |
Protected Member Functions | |
| void | executeStayAsForced (const SensorData &sensorData, JointData &jointData) |
| write sensorData back to jointData for joints with invalidValue to disable any motion (=stay as forced) | |
| void | setStayAsForcedValue (const SensorData &sensorData, JointData &jointData, SensorData::sensors sensor, JointData::JointID joint, long tolerance) |
| void | clip () |
| Clips the set joint values to allowed values. | |
Protected Attributes | |
| JointDataSequencer | sequencer |
| the JointDataSequencer | |
| JointData | stayAsForcedOldValue |
| old values for stay as forced mode | |
It ignores MotionRequest but processes and executes JointDataSequence debug messages.
Definition at line 26 of file DebugMotionControl.h.
|
|
Constructor.
Definition at line 33 of file DebugMotionControl.h. |
|
|
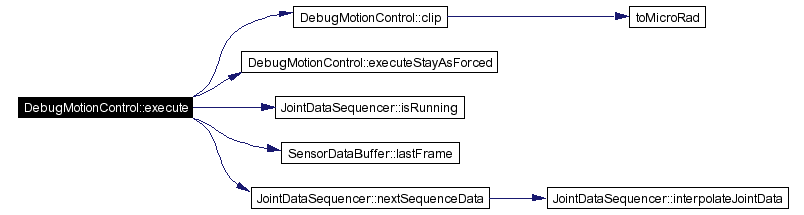
Executes the module.
Implements Module. Definition at line 11 of file DebugMotionControl.cpp. References clip(), JointData::data, executeStayAsForced(), JointDataBuffer::frame, JointDataSequencer::isRunning(), SensorDataBuffer::lastFrame(), and JointDataSequencer::nextSequenceData(). |
Here is the call graph for this function:
|
|
Called from a MessageQueue to distribute messages. Use message.getMessageID to decide if the message is relavant for the MesssageHandler derivate. Use message.bin, message.text or message.config as In streams to get the data from.
Reimplemented from Module. Definition at line 46 of file DebugMotionControl.cpp. References InMessage::bin, InMessage::getMessageID(), idJointDataSequence, and JointDataSequencer::start(). |
Here is the call graph for this function:

|
||||||||||||
|
write sensorData back to jointData for joints with invalidValue to disable any motion (=stay as forced)
Definition at line 89 of file DebugMotionControl.cpp. References SET_STAYASFORCED. Referenced by execute(). |
|
||||||||||||||||||||||||
|
Definition at line 112 of file DebugMotionControl.cpp. References SensorData::data, JointData::data, and stayAsForcedOldValue. |
|
|
Clips the set joint values to allowed values.
Definition at line 63 of file DebugMotionControl.cpp. References CLIP, JointData::data, JointDataBuffer::frame, and toMicroRad(). Referenced by execute(). |
Here is the call graph for this function:

|
|
Definition at line 53 of file DebugMotionControl.h. |
|
|
old values for stay as forced mode
Definition at line 72 of file DebugMotionControl.h. Referenced by setStayAsForcedValue(). |
 1.3.6
1.3.6