#include <GT2003MotionNetSpecialActions.h>
Inheritance diagram for GT2003MotionNetSpecialActions:
Public Member Functions | |
| GT2003MotionNetSpecialActions (SpecialActionsInterfaces &interfaces) | |
| virtual bool | executeParameterized (SpecialActionRequest specialActionRequest, JointData &jointData) |
| Executes the special action. | |
| virtual bool | specialActionIsExecutableInWalkingCycle (int specialActionID, double walkCycle) |
| virtual bool | handleMessage (InMessage &message) |
| Called from a MessageQueue to distribute messages. | |
Protected Member Functions | |
| int | getMotionIndex (MotionRequest::MotionID motionType, SpecialActionRequest::SpecialActionID specialActionType) |
| Get motion net motion index from motion type and special action id. | |
| int | getMotionIndex (const SpecialActionRequest &request) |
| Get motion net motion index from a MotionRequest. | |
| bool | getNextData (const SpecialActionRequest &specialActionRequest) |
| Get next motion node from motion net. | |
| void | calculateJointData (JointData &jointData) |
| Calculates the next joint data vector by interpolating if necessary. | |
| void | readOdometryTable () |
| Read odometry table from file. | |
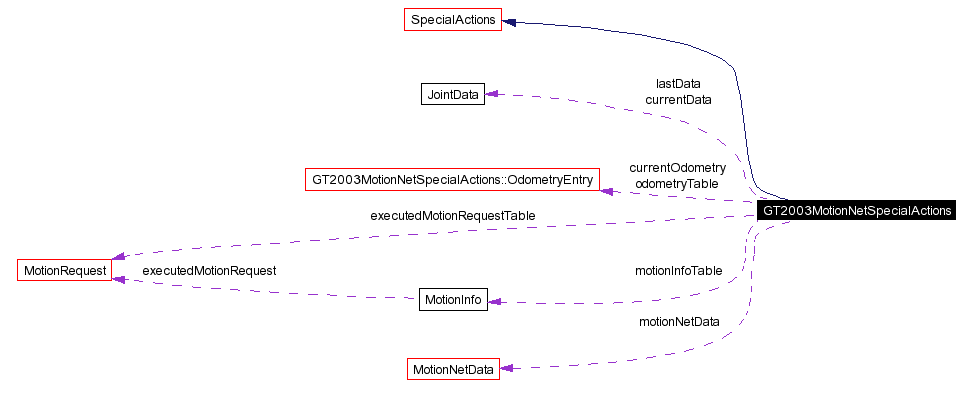
Protected Attributes | |
| MotionNetData | motionNetData |
| The motion data array. | |
| short | currentNode |
| Current motion net node. | |
| JointData | currentData |
| Current joint data. | |
| JointData | lastData |
| Last data for interpolation. | |
| bool | lastDataValid |
| Last data was set. | |
| bool | interpolationMode |
| True if values should be interpolated. | |
| long | dataRepetitionLength |
| Length of current data line in cycles. | |
| long | dataRepetitionCounter |
| Cycle counter for current data line. | |
| OdometryEntry | odometryTable [SpecialActionRequest::numOfSpecialAction+1] |
| Odometry data table Contains one entry for each motion describing robot movement per tick. | |
| MotionInfo | motionInfoTable [SpecialActionRequest::numOfSpecialAction+1] |
| Head states for each special action. | |
| MotionRequest | executedMotionRequestTable [SpecialActionRequest::numOfSpecialAction+1] |
| A table for the executed motion requests. | |
| OdometryEntry | currentOdometry |
| Odometry of current motion. | |
| SpecialActionRequest::SpecialActionID | lastSpecialActionType |
| type of last executed special action | |
Definition at line 18 of file GT2003MotionNetSpecialActions.h.
|
|
Definition at line 14 of file GT2003MotionNetSpecialActions.cpp. References SpecialActionRequest::specialActionType. |
|
||||||||||||
|
Executes the special action.
Implements SpecialActions. Definition at line 208 of file GT2003MotionNetSpecialActions.cpp. References calculateJointData(), Pose2D::conc(), currentData, currentNode, currentOdometry, dataRepetitionCounter, getNextData(), lastData, lastDataValid, lastSpecialActionType, GT2003MotionNetSpecialActions::OdometryEntry::o, and GT2003MotionNetSpecialActions::OdometryEntry::type. |
Here is the call graph for this function:

|
||||||||||||
|
Implements SpecialActions. Definition at line 244 of file GT2003MotionNetSpecialActions.cpp. References OdometryData::leaveWalkCycleSections, GT2003MotionNetSpecialActions::OdometryEntry::o, odometryTable, and OdometryData::walkCycleDissection. |
|
|
Called from a MessageQueue to distribute messages.
Reimplemented from Module. Definition at line 182 of file GT2003MotionNetSpecialActions.cpp. References InMessage::config, InMessage::getMessageID(), idMotionNet, MotionNetData::load(), and motionNetData. |
Here is the call graph for this function:

|
||||||||||||
|
Get motion net motion index from motion type and special action id.
|
|
|
Get motion net motion index from a MotionRequest.
|
|
Here is the call graph for this function:

|
|
Calculates the next joint data vector by interpolating if necessary.
Definition at line 192 of file GT2003MotionNetSpecialActions.cpp. References currentData, JointData::data, dataRepetitionCounter, dataRepetitionLength, interpolationMode, lastData, and lastDataValid. Referenced by executeParameterized(). |
|
Here is the call graph for this function:

|
|
The motion data array.
Definition at line 58 of file GT2003MotionNetSpecialActions.h. Referenced by getNextData(), and handleMessage(). |
|
|
Current motion net node.
Definition at line 61 of file GT2003MotionNetSpecialActions.h. Referenced by executeParameterized(), and getNextData(). |
|
|
Current joint data.
Definition at line 64 of file GT2003MotionNetSpecialActions.h. Referenced by calculateJointData(), executeParameterized(), and getNextData(). |
|
|
Last data for interpolation.
Definition at line 66 of file GT2003MotionNetSpecialActions.h. Referenced by calculateJointData(), and executeParameterized(). |
|
|
Last data was set.
Definition at line 69 of file GT2003MotionNetSpecialActions.h. Referenced by calculateJointData(), and executeParameterized(). |
|
|
True if values should be interpolated.
Definition at line 71 of file GT2003MotionNetSpecialActions.h. Referenced by calculateJointData(), and getNextData(). |
|
|
Length of current data line in cycles.
Definition at line 74 of file GT2003MotionNetSpecialActions.h. Referenced by calculateJointData(), and getNextData(). |
|
|
Cycle counter for current data line.
Definition at line 76 of file GT2003MotionNetSpecialActions.h. Referenced by calculateJointData(), executeParameterized(), and getNextData(). |
|
|
Odometry data table Contains one entry for each motion describing robot movement per tick.
Definition at line 103 of file GT2003MotionNetSpecialActions.h. Referenced by getNextData(), readOdometryTable(), and specialActionIsExecutableInWalkingCycle(). |
|
|
Head states for each special action.
Definition at line 106 of file GT2003MotionNetSpecialActions.h. Referenced by getNextData(), and readOdometryTable(). |
|
|
A table for the executed motion requests.
Definition at line 109 of file GT2003MotionNetSpecialActions.h. Referenced by readOdometryTable(). |
|
|
Odometry of current motion.
Definition at line 112 of file GT2003MotionNetSpecialActions.h. Referenced by executeParameterized(), and getNextData(). |
|
|
type of last executed special action
Definition at line 118 of file GT2003MotionNetSpecialActions.h. Referenced by executeParameterized(), and getNextData(). |
 1.3.6
1.3.6