#include <SpecialActions.h>
Inheritance diagram for SpecialActionsInterfaces:
Public Member Functions | |
| SpecialActionsInterfaces (const MotionRequest &motionRequest, MotionRequest::MotionID &lastMotionType, PIDData &pidData, OdometryData &odometryData, MotionInfo &motionInfo) | |
| Constructor. | |
Protected Attributes | |
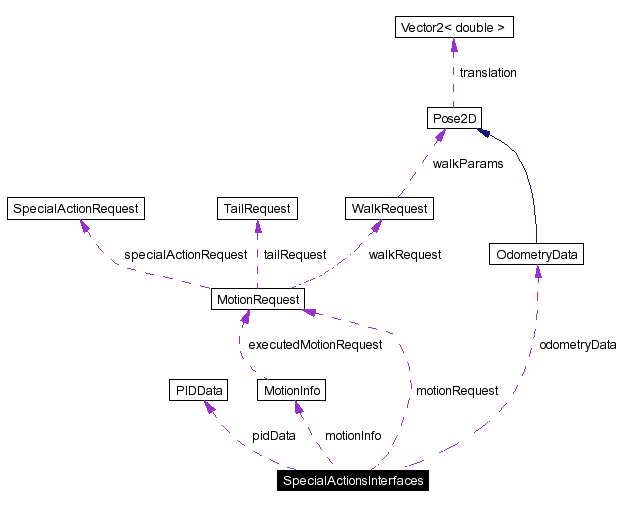
| const MotionRequest & | motionRequest |
| The current motion request. | |
| MotionRequest::MotionID & | lastMotionType |
| The motion type of the previous frame. | |
| WalkRequest::WalkType & | lastWalkType |
| The walk type of the previous frame. | |
| PIDData & | pidData |
| The current PID servo gains. | |
| OdometryData & | odometryData |
| Has to be incremented by the walking engine. | |
| MotionInfo & | motionInfo |
| The neck height and the body tilt to be estimated by the walking engine. | |
Definition at line 22 of file SpecialActions.h.
|
||||||||||||||||||||||||
|
Constructor.
Definition at line 26 of file SpecialActions.h. References lastWalkType. |
|
|
The current motion request.
Definition at line 42 of file SpecialActions.h. |
|
|
The motion type of the previous frame.
Definition at line 45 of file SpecialActions.h. |
|
|
The walk type of the previous frame.
Definition at line 48 of file SpecialActions.h. Referenced by SpecialActionsInterfaces(). |
|
|
The current PID servo gains.
Definition at line 51 of file SpecialActions.h. |
|
|
Has to be incremented by the walking engine.
Definition at line 54 of file SpecialActions.h. |
|
|
The neck height and the body tilt to be estimated by the walking engine.
Definition at line 57 of file SpecialActions.h. |
 1.3.6
1.3.6