#include <GT2004ObstaclesLocator.h>
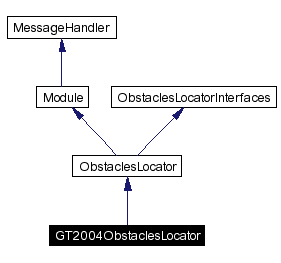
Inheritance diagram for GT2004ObstaclesLocator:
Public Types | |
| enum | { timeAfterWhichObstacleIsForgotten = 6000 } |
| enum | UpdateMode { overwrite, extend, limit } |
Public Member Functions | |
| GT2004ObstaclesLocator (const ObstaclesLocatorInterfaces &interfaces) | |
| Constructor. | |
| virtual void | execute () |
| Executes the module. | |
| void | setObstaclesModel (bool addWorldModel=true) |
| void | moveObstaclesByOdometry () |
| void | addLinesPercept () |
| void | addObstaclesPercept () |
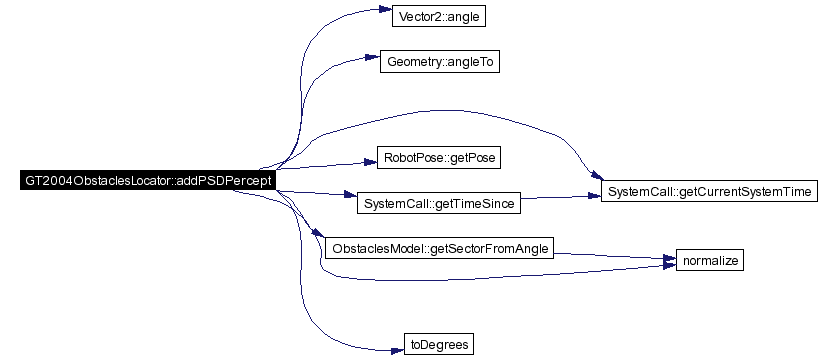
| void | addPSDPercept () |
| void | addObstaclePoint (const Vector2< double > &obstaclePoint, UpdateMode mode) |
| void | addObstaclePoints (const Vector2< int > &nearPoint, const Vector2< int > &farPoint, bool farPointIsOnImageBorder, ObstaclesPercept::ObstacleType obstacleType) |
| virtual bool | handleMessage (InMessage &message) |
| Called from a MessageQueue to distribute messages. | |
Public Attributes | |
| int | relativeOrientation |
| Field | field |
| Vector2< double > | obstacles [ObstaclesModel::numOfSectors] |
| ObstaclesPercept::ObstacleType | obstacleTypes [ObstaclesModel::numOfSectors] |
| unsigned long | timestamps [ObstaclesModel::numOfSectors] |
| double | sectorWidth |
| OdometryData | lastOdometry |
| Pose2D | odometry |
| double | headTiltClipPSD |
| head tilt angle below which psd percepts are ignored | |
| bool | usePSD |
| bool | useLinesPercept |
| bool | useObstaclesPercept |
| bool | useAging |
Private Member Functions | |
| void | determineFreePartsOfGoals () |
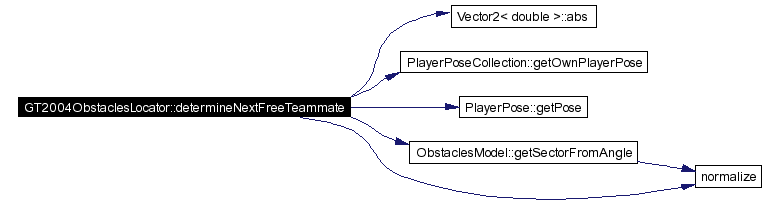
| void | determineNextFreeTeammate () |
Private Attributes | |
| unsigned long | lastTimeFreePartOfGoalWasDetermined [2] |
| Last time a free part of a goal was detected. | |
| double | angleToFreePartOfGoal [2] |
| angle to a free part of the goal, updated by vision and turn(!) odometry | |
| double | widthOfFreePartOfGoal [2] |
| the width of the free part of goal | |
| double | distanceToFreePartOfGoal [2] |
| the distance to the free part of the goal | |
Definition at line 18 of file GT2004ObstaclesLocator.h.
|
|
Definition at line 22 of file GT2004ObstaclesLocator.h. |
|
|
Definition at line 61 of file GT2004ObstaclesLocator.h. |
|
|
Constructor.
Definition at line 17 of file GT2004ObstaclesLocator.cpp. References obstacles, obstacleTypes, pi2, sectorWidth, useAging, useLinesPercept, useObstaclesPercept, usePSD, Vector2< double >::x, and Vector2< double >::y. |
|
|
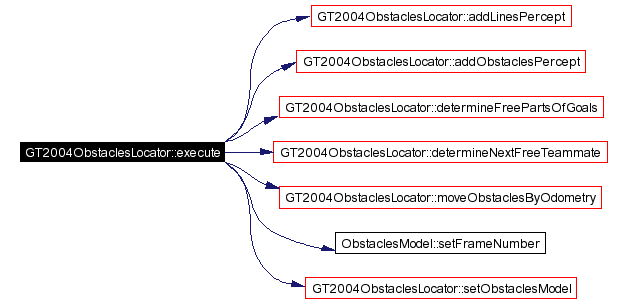
Executes the module.
Implements Module. Definition at line 36 of file GT2004ObstaclesLocator.cpp. References addLinesPercept(), addObstaclesPercept(), DEBUG_DRAWING_FINISHED, determineFreePartsOfGoals(), determineNextFreeTeammate(), ObstaclesPercept::frameNumber, moveObstaclesByOdometry(), odometry, ObstaclesModel::setFrameNumber(), setObstaclesModel(), useLinesPercept, and useObstaclesPercept. |
Here is the call graph for this function:
|
Here is the call graph for this function:
|
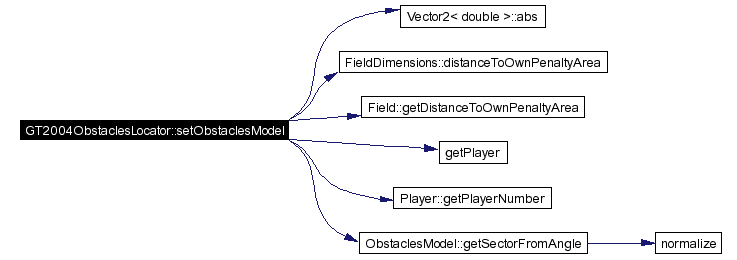
|
Definition at line 56 of file GT2004ObstaclesLocator.cpp. References ObstaclesModel::getSectorFromAngle(), SystemCall::getTimeSince(), obstacles, obstacleTypes, odometry, Pose2D::rotation, timeAfterWhichObstacleIsForgotten, timestamps, Pose2D::translation, useAging, Vector2< double >::x, and Vector2< double >::y. Referenced by execute(). |
Here is the call graph for this function:

|
|
Definition at line 246 of file GT2004ObstaclesLocator.cpp. References addObstaclePoint(), extend, limit, LinesPercept::numberOfPoints, and LinesPercept::points. Referenced by execute(). |
Here is the call graph for this function:

|
|
Definition at line 266 of file GT2004ObstaclesLocator.cpp. References addObstaclePoints(), ObstaclesPercept::farPointIsOnImageBorder, ObstaclesPercept::farPoints, ObstaclesPercept::nearPoints, ObstaclesPercept::numberOfPoints, and ObstaclesPercept::obstacleType. Referenced by execute(). |
Here is the call graph for this function:

|
Here is the call graph for this function:
|
||||||||||||
|
Definition at line 293 of file GT2004ObstaclesLocator.cpp. References DOT, SystemCall::getCurrentSystemTime(), ObstaclesModel::getSectorFromAngle(), idText, normalize(), and OUTPUT. Referenced by addLinesPercept(). |
Here is the call graph for this function:

|
||||||||||||||||||||
|
Definition at line 361 of file GT2004ObstaclesLocator.cpp. References SystemCall::getCurrentSystemTime(), ObstaclesModel::getSectorFromAngle(), idText, normalize(), and OUTPUT. Referenced by addObstaclesPercept(). |
Here is the call graph for this function:

|
|
Called from a MessageQueue to distribute messages. Use message.getMessageID to decide if the message is relavant for the MesssageHandler derivate. Use message.bin, message.text or message.config as In streams to get the data from.
Reimplemented from Module. Definition at line 485 of file GT2004ObstaclesLocator.cpp. References InMessage::bin, GenericDebugData::data, InMessage::getMessageID(), headTiltClipPSD, GenericDebugData::id, idGenericDebugData, idText, OUTPUT, useAging, useLinesPercept, and usePSD. |
Here is the call graph for this function:

|
Here is the call graph for this function:

|
Here is the call graph for this function:
|
|
Definition at line 32 of file GT2004ObstaclesLocator.h. |
|
|
Definition at line 34 of file GT2004ObstaclesLocator.h. |
|
|
Definition at line 35 of file GT2004ObstaclesLocator.h. Referenced by addPSDPercept(), determineNextFreeTeammate(), GT2004ObstaclesLocator(), moveObstaclesByOdometry(), and setObstaclesModel(). |
|
|
Definition at line 36 of file GT2004ObstaclesLocator.h. Referenced by GT2004ObstaclesLocator(), moveObstaclesByOdometry(), and setObstaclesModel(). |
|
|
Definition at line 38 of file GT2004ObstaclesLocator.h. Referenced by addPSDPercept(), and moveObstaclesByOdometry(). |
|
|
Definition at line 40 of file GT2004ObstaclesLocator.h. Referenced by GT2004ObstaclesLocator(). |
|
|
Definition at line 41 of file GT2004ObstaclesLocator.h. |
|
|
Definition at line 42 of file GT2004ObstaclesLocator.h. Referenced by determineFreePartsOfGoals(), execute(), and moveObstaclesByOdometry(). |
|
|
head tilt angle below which psd percepts are ignored
Definition at line 45 of file GT2004ObstaclesLocator.h. Referenced by addPSDPercept(), and handleMessage(). |
|
|
Definition at line 50 of file GT2004ObstaclesLocator.h. Referenced by GT2004ObstaclesLocator(), and handleMessage(). |
|
|
Definition at line 51 of file GT2004ObstaclesLocator.h. Referenced by execute(), GT2004ObstaclesLocator(), and handleMessage(). |
|
|
Definition at line 52 of file GT2004ObstaclesLocator.h. Referenced by execute(), and GT2004ObstaclesLocator(). |
|
|
Definition at line 53 of file GT2004ObstaclesLocator.h. Referenced by GT2004ObstaclesLocator(), handleMessage(), and moveObstaclesByOdometry(). |
|
|
Last time a free part of a goal was detected.
Definition at line 78 of file GT2004ObstaclesLocator.h. Referenced by determineFreePartsOfGoals(). |
|
|
angle to a free part of the goal, updated by vision and turn(!) odometry
Definition at line 81 of file GT2004ObstaclesLocator.h. |
|
|
the width of the free part of goal
Definition at line 84 of file GT2004ObstaclesLocator.h. |
|
|
the distance to the free part of the goal
Definition at line 87 of file GT2004ObstaclesLocator.h. |
 1.3.6
1.3.6