#include <ObstaclesLocator.h>
Inheritance diagram for ObstaclesLocatorInterfaces:
Public Member Functions | |
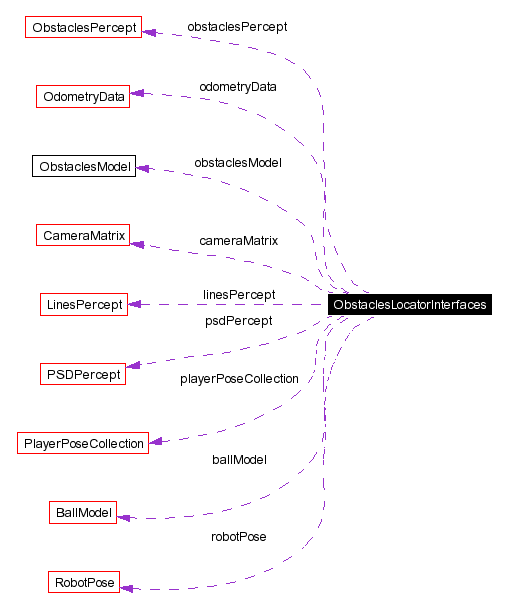
| ObstaclesLocatorInterfaces (const ObstaclesPercept &obstaclesPercept, const LinesPercept &linesPercept, const PSDPercept &psdPercept, const CameraMatrix &cameraMatrix, const OdometryData &odometryData, const PlayerPoseCollection &playerPoseCollection, const RobotPose &robotPose, const BallModel &ballModel, ObstaclesModel &obstaclesModel) | |
| Constructor. | |
Protected Attributes | |
| const ObstaclesPercept & | obstaclesPercept |
| A detected player. | |
| const LinesPercept & | linesPercept |
| A lines percept. | |
| const PSDPercept & | psdPercept |
| An object detected with the PSD sensor. | |
| const CameraMatrix & | cameraMatrix |
| A detected player. | |
| const OdometryData & | odometryData |
| The odometry data that was calculated by the motion modules. | |
| const PlayerPoseCollection & | playerPoseCollection |
| The poses of the other players. | |
| const RobotPose & | robotPose |
| The pose of the robot. | |
| const BallModel & | ballModel |
| The pose of the robot. | |
| ObstaclesModel & | obstaclesModel |
| The obstacle model to be calculated. | |
Definition at line 28 of file ObstaclesLocator.h.
|
||||||||||||||||||||||||||||||||||||||||
|
Constructor.
Definition at line 32 of file ObstaclesLocator.h. |
|
|
A detected player.
Definition at line 55 of file ObstaclesLocator.h. |
|
|
A lines percept.
Definition at line 58 of file ObstaclesLocator.h. |
|
|
An object detected with the PSD sensor.
Definition at line 61 of file ObstaclesLocator.h. |
|
|
A detected player.
Definition at line 64 of file ObstaclesLocator.h. |
|
|
The odometry data that was calculated by the motion modules.
Definition at line 67 of file ObstaclesLocator.h. |
|
|
The poses of the other players.
Definition at line 70 of file ObstaclesLocator.h. |
|
|
The pose of the robot.
Definition at line 73 of file ObstaclesLocator.h. |
|
|
The pose of the robot.
Definition at line 76 of file ObstaclesLocator.h. |
|
|
The obstacle model to be calculated.
Definition at line 79 of file ObstaclesLocator.h. |
 1.3.6
1.3.6