#include <SelfLocator.h>
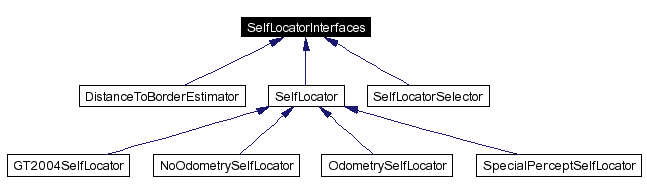
Inheritance diagram for SelfLocatorInterfaces:
Public Member Functions | |
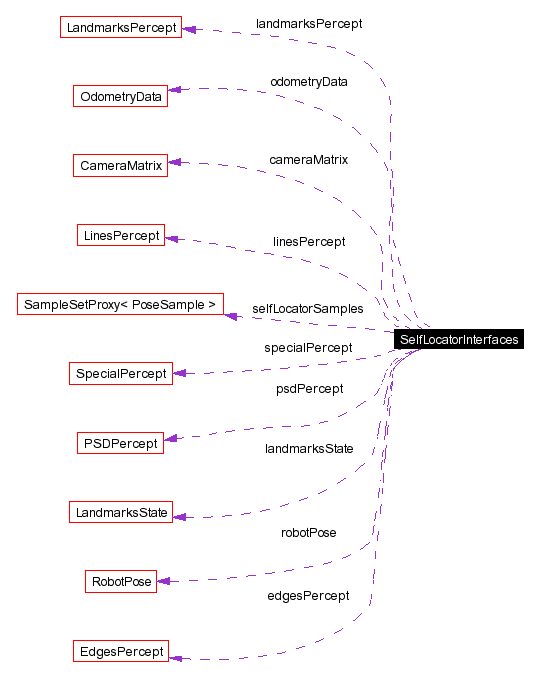
| SelfLocatorInterfaces (const LandmarksPercept &landmarksPercept, const LinesPercept &linesPercept, const EdgesPercept &edgesPercept, const SpecialPercept &specialPercept, const PSDPercept &psdPercept, const OdometryData &odometryData, const CameraMatrix &cameraMatrix, RobotPose &robotPose, SampleSetProxy< PoseSample > &selfLocatorSamples, LandmarksState &landmarksState) | |
| Constructor. | |
Protected Attributes | |
| const LandmarksPercept & | landmarksPercept |
| The landmarks detected in the last image. | |
| const LinesPercept & | linesPercept |
| The lines detected in the last image. | |
| const EdgesPercept & | edgesPercept |
| The edges detected in the last image. | |
| const SpecialPercept & | specialPercept |
| The special percepts detected in the last image. | |
| const PSDPercept & | psdPercept |
| The psd percepts detected with the PSD sensor. | |
| const OdometryData & | odometryData |
| The odometry that was estimated by the motion modules. | |
| const CameraMatrix & | cameraMatrix |
| The camera matrix describing the camera's position. | |
| RobotPose & | robotPose |
| The robots position to be generated. | |
| SampleSetProxy< PoseSample > & | selfLocatorSamples |
| The sample set proxy linked to the sample set of the active locator. | |
| LandmarksState & | landmarksState |
| the currently seen landmarks | |
Definition at line 28 of file SelfLocator.h.
|
||||||||||||||||||||||||||||||||||||||||||||
|
Constructor.
Definition at line 32 of file SelfLocator.h. |
|
|
The landmarks detected in the last image.
Definition at line 57 of file SelfLocator.h. |
|
|
The lines detected in the last image.
Definition at line 60 of file SelfLocator.h. |
|
|
The edges detected in the last image.
Definition at line 63 of file SelfLocator.h. |
|
|
The special percepts detected in the last image.
Definition at line 66 of file SelfLocator.h. |
|
|
The psd percepts detected with the PSD sensor.
Definition at line 69 of file SelfLocator.h. |
|
|
The odometry that was estimated by the motion modules.
Definition at line 72 of file SelfLocator.h. |
|
|
The camera matrix describing the camera's position.
Definition at line 75 of file SelfLocator.h. |
|
|
The robots position to be generated.
Definition at line 78 of file SelfLocator.h. |
|
|
The sample set proxy linked to the sample set of the active locator.
Definition at line 81 of file SelfLocator.h. |
|
|
the currently seen landmarks
Definition at line 84 of file SelfLocator.h. |
 1.3.6
1.3.6