#include <GetupEngine.h>
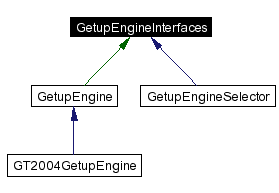
Inheritance diagram for GetupEngineInterfaces:
Public Member Functions | |
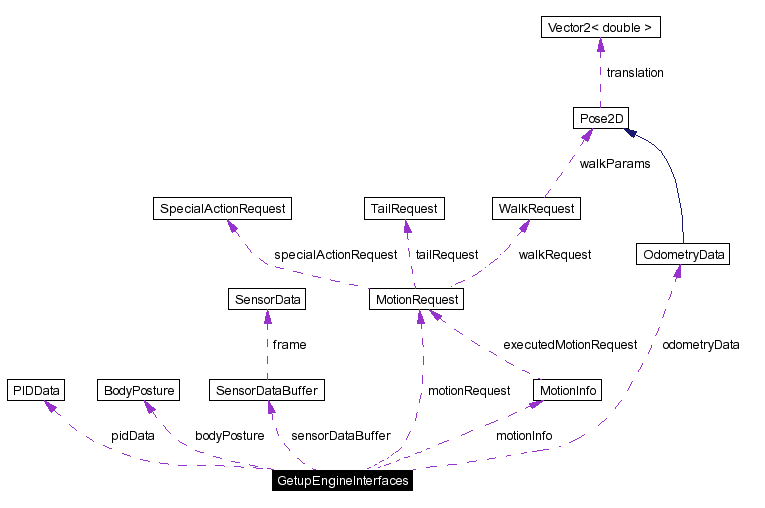
| GetupEngineInterfaces (const MotionRequest::MotionID &lastMotionType, const SensorDataBuffer &sensorDataBuffer, const MotionRequest &motionRequest, const BodyPosture &bodyPosture, PIDData &pidData, OdometryData &odometryData, MotionInfo &motionInfo) | |
| Constructor. | |
Protected Attributes | |
| const MotionRequest::MotionID & | lastMotionType |
| The motion type of the previous frame. | |
| const SensorDataBuffer & | sensorDataBuffer |
| The current sensor data. | |
| const MotionRequest & | motionRequest |
| The current motion request. | |
| const BodyPosture & | bodyPosture |
| The current body posture. | |
| PIDData & | pidData |
| The current PID servo gains. | |
| OdometryData & | odometryData |
| Calculated odometry data. | |
| MotionInfo & | motionInfo |
| The neck height and the body tilt to be estimated by the getup engine. | |
Definition at line 26 of file GetupEngine.h.
|
||||||||||||||||||||||||||||||||
|
Constructor.
Definition at line 30 of file GetupEngine.h. |
|
|
The motion type of the previous frame.
Definition at line 48 of file GetupEngine.h. |
|
|
The current sensor data.
Definition at line 51 of file GetupEngine.h. |
|
|
The current motion request.
Definition at line 54 of file GetupEngine.h. |
|
|
The current body posture.
Definition at line 57 of file GetupEngine.h. |
|
|
The current PID servo gains.
Definition at line 60 of file GetupEngine.h. |
|
|
Calculated odometry data.
Definition at line 63 of file GetupEngine.h. |
|
|
The neck height and the body tilt to be estimated by the getup engine.
Definition at line 66 of file GetupEngine.h. |
 1.3.6
1.3.6