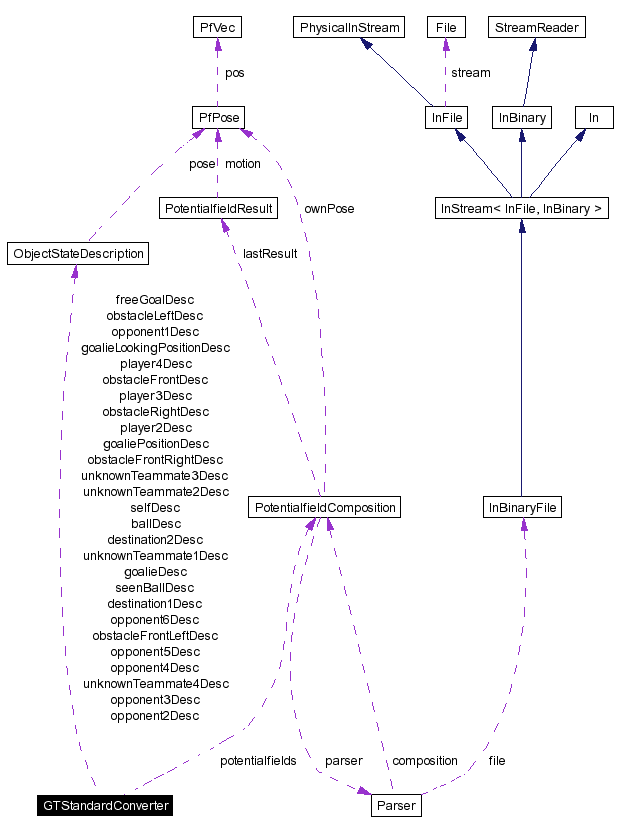
#include <GTStandardConverter.h>
Collaboration diagram for GTStandardConverter:
Public Member Functions | |
| GTStandardConverter (const char *fileName) | |
| Constructor. | |
| GTStandardConverter () | |
| Constructor. | |
| void | load (const char *filename) |
| Loads a configuration file. | |
| void | execute (const RobotPose &robotPose, const BallModel &ballPosition, const PlayerPoseCollection &playerPoseCollection, const ObstaclesModel &obstaclesModel, const TeamMessageCollection &teamMessageCollection, PotentialfieldResult &result) |
| Calls the potential fields with data from the world model and returns an action. | |
| void | execute (const RobotPose &robotPose, const BallModel &ballPosition, const PlayerPoseCollection &playerPoseCollection, const ObstaclesModel &obstaclesModel, const TeamMessageCollection &teamMessageCollection, const Pose2D &specialDestination1, const Pose2D &specialDestination2, const int &numberOfSpecialDestinations, PotentialfieldResult &result) |
| Calls the potential fields with data from the world model and returns an action. | |
| void | getValueArray (const RobotPose &robotPose, const BallModel &ballPosition, const PlayerPoseCollection &playerPoseCollection, const ObstaclesModel &obstaclesModel, const TeamMessageCollection &teamMessageCollection, const std::string &fieldname, double x1, double y1, double x2, double y2, int xSteps, int ySteps, double value[], double &max) |
| Computes an array of field values, used by visualization. | |
| void | getDirectionArray (const RobotPose &robotPose, const BallModel &ballPosition, const PlayerPoseCollection &playerPoseCollection, const ObstaclesModel &obstaclesModel, const TeamMessageCollection &teamMessageCollection, const std::string &fieldname, double x1, double y1, double x2, double y2, int xSteps, int ySteps, PfVec directions[]) |
| Computes an array of gradient directions, used by visualization. | |
| void | getFieldNames (std::vector< std::string > &fieldNames) |
| Returns the names of all fields within the potential field composition. | |
Private Member Functions | |
| void | setData (const RobotPose &robotPose, const BallModel &ballPosition, const PlayerPoseCollection &playerPoseCollection, const ObstaclesModel &obstaclesModel, const TeamMessageCollection &teamMessageCollection) |
| Updates the potentialfields with data from the world model. | |
Private Attributes | |
| PotentialfieldComposition | potentialfields |
| An instance of the potential field implementation. | |
| ObjectStateDescription | seenBallDesc |
| Information about the ball. | |
| ObjectStateDescription | ballDesc |
| Information about the ball. | |
| ObjectStateDescription | selfDesc |
| Information about the robot, needed by some behaviors. | |
| ObjectStateDescription | goalieDesc |
| Information about the own team. | |
| ObjectStateDescription | player2Desc |
| Information about the own team. | |
| ObjectStateDescription | player3Desc |
| Information about the own team. | |
| ObjectStateDescription | player4Desc |
| Information about the own team. | |
| ObjectStateDescription | unknownTeammate1Desc |
| ObjectStateDescription | unknownTeammate2Desc |
| ObjectStateDescription | unknownTeammate3Desc |
| ObjectStateDescription | unknownTeammate4Desc |
| ObjectStateDescription | opponent1Desc |
| Information about the other team. | |
| ObjectStateDescription | opponent2Desc |
| Information about the other team. | |
| ObjectStateDescription | opponent3Desc |
| Information about the other team. | |
| ObjectStateDescription | opponent4Desc |
| Information about the other team. | |
| ObjectStateDescription | opponent5Desc |
| Information about the other team. | |
| ObjectStateDescription | opponent6Desc |
| Information about the other team. | |
| ObjectStateDescription | destination1Desc |
| Information about special destinations. | |
| ObjectStateDescription | destination2Desc |
| Information about special destinations. | |
| ObjectStateDescription | obstacleFrontDesc |
| Information about obstacles. | |
| ObjectStateDescription | obstacleLeftDesc |
| Information about obstacles. | |
| ObjectStateDescription | obstacleRightDesc |
| Information about obstacles. | |
| ObjectStateDescription | obstacleFrontLeftDesc |
| Information about obstacles. | |
| ObjectStateDescription | obstacleFrontRightDesc |
| Information about obstacles. | |
| ObjectStateDescription | freeGoalDesc |
| Information about the free part of the goal. | |
| ObjectStateDescription | goalieLookingPositionDesc |
| Position to look be looked at by goalie. | |
| ObjectStateDescription | goaliePositionDesc |
| The goalie position. | |
| double | angleToFrontObstacle |
| Angles to obstacles. | |
| double | angleToLeftObstacle |
| Angles to obstacles. | |
| double | angleToRightObstacle |
| Angles to obstacles. | |
| double | angleToFrontLeftObstacle |
| Angles to obstacles. | |
| double | angleToFrontRightObstacle |
| Angles to obstacles. | |
| double | openingAngle |
| Opening angle of an obstacle sector. | |
Definition at line 30 of file GTStandardConverter.h.
|
|
Constructor.
Definition at line 21 of file GTStandardConverter.cpp. References load(). |
Here is the call graph for this function:

|
|
Constructor.
Definition at line 27 of file GTStandardConverter.cpp. |
|
Here is the call graph for this function:

|
||||||||||||||||||||||||||||
|
Calls the potential fields with data from the world model and returns an action.
Definition at line 102 of file GTStandardConverter.cpp. Referenced by GT2004PotentialFieldBasicBehaviorOffensiveSupport::execute(), GT2004PotentialFieldBasicBehaviorSupport::execute(), and GT2004PotentialFieldBasicBehaviorGoToPose::execute(). |
|
||||||||||||||||||||||||||||||||||||||||
|
Calls the potential fields with data from the world model and returns an action.
Definition at line 115 of file GTStandardConverter.cpp. References destination1Desc, destination2Desc, PotentialfieldComposition::execute(), ObjectStateDescription::isActive, PfPose::pos, ObjectStateDescription::pose, potentialfields, PfPose::probability, Pose2D::rotation, PfPose::rotation, setData(), PotentialfieldComposition::setObjectState(), Pose2D::translation, Vector2< double >::x, PfVec::x, Vector2< double >::y, and PfVec::y. |
Here is the call graph for this function:

|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Computes an array of field values, used by visualization.
Definition at line 514 of file GTStandardConverter.cpp. References PotentialfieldComposition::getValueArray(), max, potentialfields, and setData(). |
Here is the call graph for this function:

|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Computes an array of gradient directions, used by visualization.
Definition at line 527 of file GTStandardConverter.cpp. References PotentialfieldComposition::getDirectionArray(), potentialfields, and setData(). |
Here is the call graph for this function:

|
|
Returns the names of all fields within the potential field composition.
Definition at line 540 of file GTStandardConverter.cpp. References PotentialfieldComposition::getFieldNames(), and potentialfields. |
Here is the call graph for this function:

|
||||||||||||||||||||||||
|
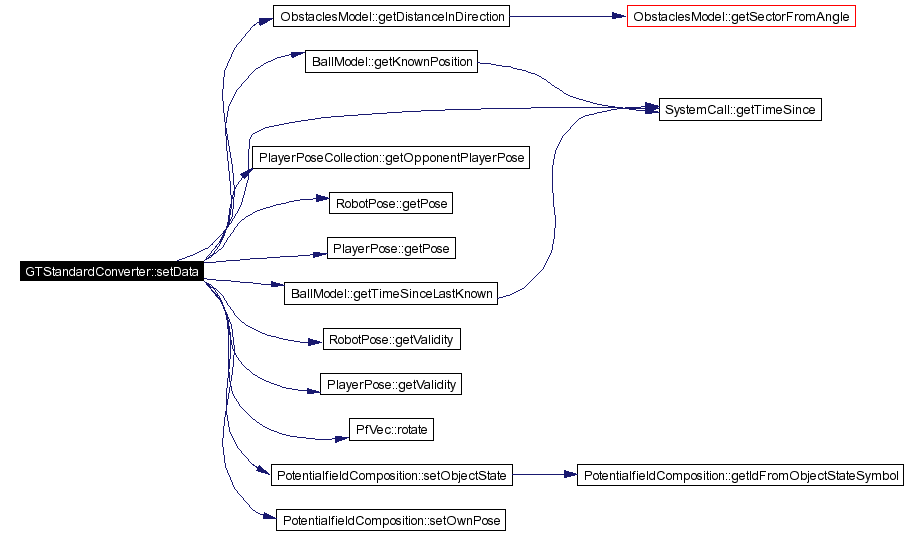
Updates the potentialfields with data from the world model.
Definition at line 159 of file GTStandardConverter.cpp. References angleToFrontLeftObstacle, angleToFrontObstacle, angleToFrontRightObstacle, angleToLeftObstacle, angleToRightObstacle, ballDesc, freeGoalDesc, ObstaclesModel::getDistanceInDirection(), BallModel::getKnownPosition(), PlayerPoseCollection::getOpponentPlayerPose(), RobotPose::getPose(), PlayerPose::getPose(), SystemCall::getTimeSince(), BallModel::getTimeSinceLastKnown(), RobotPose::getValidity(), PlayerPose::getValidity(), goalieDesc, goalieLookingPositionDesc, goaliePositionDesc, ObjectStateDescription::isActive, PlayerPoseCollection::numberOfOpponentPlayers, TeamMessageCollection::numberOfTeamMessages, obstacleFrontDesc, obstacleFrontLeftDesc, obstacleFrontRightDesc, obstacleLeftDesc, obstacleRightDesc, openingAngle, opponent1Desc, opponent2Desc, opponent3Desc, opponent4Desc, opponent5Desc, opponent6Desc, player2Desc, player3Desc, player4Desc, PfPose::pos, ObjectStateDescription::pose, potentialfields, PfPose::probability, PfVec::rotate(), Pose2D::rotation, PfPose::rotation, BallModel::seen, seenBallDesc, selfDesc, PotentialfieldComposition::setObjectState(), PotentialfieldComposition::setOwnPose(), SeenBallPosition::timeWhenLastSeen, Pose2D::translation, unknownTeammate1Desc, unknownTeammate2Desc, unknownTeammate3Desc, unknownTeammate4Desc, Vector2< double >::x, PfVec::x, Vector2< double >::y, and PfVec::y. Referenced by execute(), getDirectionArray(), and getValueArray(). |
Here is the call graph for this function:
|
|
An instance of the potential field implementation.
Definition at line 141 of file GTStandardConverter.h. Referenced by execute(), getDirectionArray(), getFieldNames(), getValueArray(), load(), and setData(). |
|
|
Information about the ball.
Definition at line 143 of file GTStandardConverter.h. |
|
|
Information about the ball.
Definition at line 143 of file GTStandardConverter.h. |
|
|
Information about the robot, needed by some behaviors.
Definition at line 145 of file GTStandardConverter.h. |
|
|
Information about the own team.
Definition at line 147 of file GTStandardConverter.h. |
|
|
Information about the own team.
Definition at line 147 of file GTStandardConverter.h. |
|
|
Information about the own team.
Definition at line 147 of file GTStandardConverter.h. |
|
|
Information about the own team.
Definition at line 147 of file GTStandardConverter.h. |
|
|
Definition at line 148 of file GTStandardConverter.h. |
|
|
Definition at line 148 of file GTStandardConverter.h. |
|
|
Definition at line 148 of file GTStandardConverter.h. |
|
|
Definition at line 148 of file GTStandardConverter.h. |
|
|
Information about the other team.
Definition at line 151 of file GTStandardConverter.h. |
|
|
Information about the other team.
Definition at line 151 of file GTStandardConverter.h. |
|
|
Information about the other team.
Definition at line 151 of file GTStandardConverter.h. |
|
|
Information about the other team.
Definition at line 151 of file GTStandardConverter.h. |
|
|
Information about the other team.
Definition at line 151 of file GTStandardConverter.h. |
|
|
Information about the other team.
Definition at line 151 of file GTStandardConverter.h. |
|
|
Information about special destinations.
Definition at line 154 of file GTStandardConverter.h. |
|
|
Information about special destinations.
Definition at line 154 of file GTStandardConverter.h. |
|
|
Information about obstacles.
Definition at line 156 of file GTStandardConverter.h. |
|
|
Information about obstacles.
Definition at line 156 of file GTStandardConverter.h. |
|
|
Information about obstacles.
Definition at line 156 of file GTStandardConverter.h. |
|
|
Information about obstacles.
Definition at line 156 of file GTStandardConverter.h. |
|
|
Information about obstacles.
Definition at line 156 of file GTStandardConverter.h. |
|
|
Information about the free part of the goal.
Definition at line 159 of file GTStandardConverter.h. |
|
|
Position to look be looked at by goalie.
Definition at line 161 of file GTStandardConverter.h. |
|
|
The goalie position.
Definition at line 163 of file GTStandardConverter.h. |
|
|
Angles to obstacles.
Definition at line 165 of file GTStandardConverter.h. |
|
|
Angles to obstacles.
Definition at line 165 of file GTStandardConverter.h. |
|
|
Angles to obstacles.
Definition at line 165 of file GTStandardConverter.h. |
|
|
Angles to obstacles.
Definition at line 165 of file GTStandardConverter.h. |
|
|
Angles to obstacles.
Definition at line 165 of file GTStandardConverter.h. |
|
|
Opening angle of an obstacle sector.
Definition at line 168 of file GTStandardConverter.h. |
 1.3.6
1.3.6