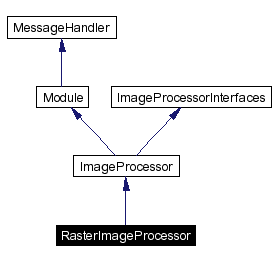
#include <RasterImageProcessor.h>
Inheritance diagram for RasterImageProcessor:
Public Member Functions | |
| RasterImageProcessor (const ImageProcessorInterfaces &interfaces) | |
| The consructor. | |
| virtual | ~RasterImageProcessor () |
| Destructor. | |
| virtual void | execute () |
| Executes the module. | |
| virtual bool | handleMessage (InMessage &message) |
| Handles messages for this module. | |
| RasterSpecialist * | getSpecialist (int type) |
| Getter for a specialist. | |
| void | setSpecialist (RasterSpecialist *spec) |
| Sets a specialist, if there is a specialist of the same type registered, it will be deleted. | |
| void | removeSpecialist (int type) |
| Removes a specialist from the image-processor. | |
| Geometry::Line | getHorizon () |
| Getter for the member horizon. | |
| void | addFieldPoint (int x, int y, LinesPercept::LineType type) |
| Adds a point to the LinesPercept. | |
| void | addObstaclePoints (Vector2< int > &nearPointInImage, Vector2< int > &farPointInImage, ObstaclesPercept::ObstacleType type) |
| Adds a point to the ObstaclesPercept. | |
| bool | isValidPoint (Vector2< double > &p) |
| Tests if the point lies in the valid image area. | |
| void | addFlag (Vector2< double > &left, Vector2< double > &right, Vector2< double > &top, Vector2< double > &bottom, Flag::FlagType type) |
| Adds a flag to the model. | |
| void | changeStrategy (RasterStrategy &newStrategy) |
| Changes the strategy. | |
| DECLARE_DEBUG_COLOR_CLASS_IMAGE (segmentedImage1) | |
| The color-class image. | |
Public Attributes | |
| SUSANEdgeDetectionLite | edgeDetector |
| An edge detector. | |
| ColorCorrector | corrector |
| The color-corrector. | |
| Geometry::Line | horizon |
| The calculated horizon. | |
| int | minX |
| Minimal x-coordinate of the image-raster. | |
| int | maxX |
| Maximal x-coordinate of the image-raster. | |
| int | minY |
| Minimal y-coordinate of the image-raster. | |
| int | maxY |
| Maximal y-coordinate of the image-raster. | |
| int | marginX |
| The margin between two scanlines. | |
| int | marginY |
| The margin between two scanlines. | |
Private Member Functions | |
| void | init () |
| Initializes the module. | |
| DECLARE_DEBUG_IMAGE (imageProcessorGeneral) | |
| DECLARE_DEBUG_IMAGE (imageProcessorBall) | |
| DECLARE_DEBUG_IMAGE (imageProcessorObstacles) | |
| DECLARE_DEBUG_IMAGE (imageProcessorFlagsAndGoals) | |
| DECLARE_DEBUG_IMAGE (imageProcessorGround) | |
Private Attributes | |
| RasterSpecialist * | specials [maxRasterSpecialists] |
| The concurrent specialists. | |
| RasterStrategy * | strategy |
| The active strategy. | |
| RasterStrategy * | waitingStrategy |
| The new strategy in the next frame. | |
Definition at line 48 of file RasterImageProcessor.h.
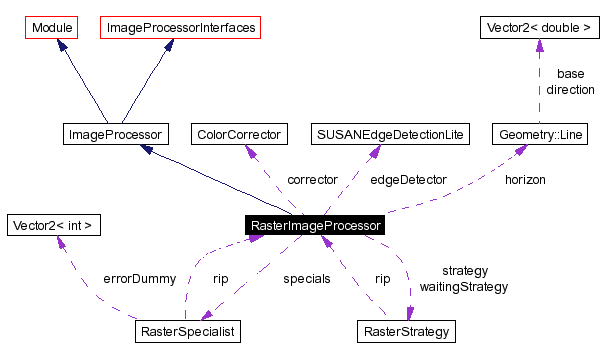
|
|
The consructor.
Definition at line 21 of file RasterImageProcessor.cpp. References Image::cameraInfo, maxRasterSpecialists, CameraInfo::resolutionHeight, CameraInfo::resolutionWidth, specials, and waitingStrategy. |
|
|
Destructor.
Definition at line 41 of file RasterImageProcessor.cpp. |
|
|
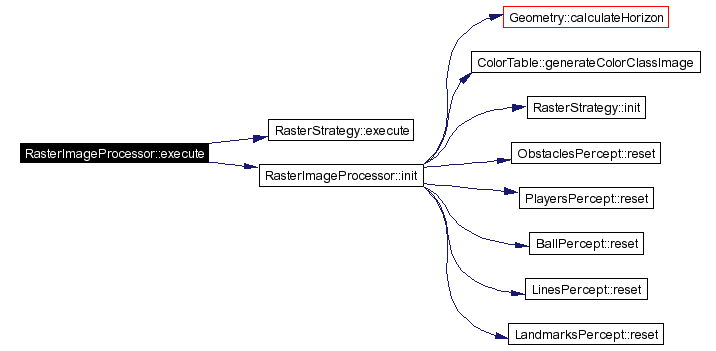
Executes the module.
Implements Module. Definition at line 46 of file RasterImageProcessor.cpp. References DEBUG_DRAWING_FINISHED, RasterStrategy::execute(), init(), and INIT_DEBUG_IMAGE. |
Here is the call graph for this function:
|
|
Handles messages for this module.
Reimplemented from Module. Definition at line 83 of file RasterImageProcessor.cpp. |
|
|
Getter for a specialist.
Definition at line 90 of file RasterImageProcessor.cpp. References specials. |
|
|
Sets a specialist, if there is a specialist of the same type registered, it will be deleted.
Definition at line 95 of file RasterImageProcessor.cpp. References RasterSpecialist::getType(), and specials. Referenced by RDefaultStrategy::RDefaultStrategy(). |
Here is the call graph for this function:

|
|
Removes a specialist from the image-processor. Afterwards getSpecialist(type) is NULL.
Definition at line 103 of file RasterImageProcessor.cpp. References specials. |
|
|
Getter for the member horizon.
Definition at line 95 of file RasterImageProcessor.h. Referenced by RBallSpecialist2::addBallPercept(), REnemySpecialist::calculateFarestPoint(), REnemySpecialist::calculateFarestPointCOG(), REnemySpecialist::calculateFarestPointFastCOG(), RBridgeSpecialist::executePostProcessing(), and BoxSpecialist::executePostProcessing(). |
|
||||||||||||||||
|
Adds a point to the LinesPercept.
Definition at line 101 of file RasterImageProcessor.h. References LinesPercept::add(), Geometry::calculatePointOnField(), and Image::cameraInfo. Referenced by RDefaultStrategy::postScan(). |
Here is the call graph for this function:

|
||||||||||||||||
|
Adds a point to the ObstaclesPercept.
Definition at line 112 of file RasterImageProcessor.h. References ObstaclesPercept::add(), Geometry::calculatePointOnField(), Image::cameraInfo, CameraInfo::resolutionHeight, CameraInfo::resolutionWidth, Vector2< V >::x, and Vector2< V >::y. Referenced by RDefaultStrategy::postScan(). |
Here is the call graph for this function:

|
|
Tests if the point lies in the valid image area.
Definition at line 136 of file RasterImageProcessor.h. References Image::cameraInfo, CameraInfo::resolutionHeight, CameraInfo::resolutionWidth, Vector2< V >::x, and Vector2< V >::y. Referenced by addFlag(). |
|
||||||||||||||||||||||||
|
Adds a flag to the model.
Definition at line 152 of file RasterImageProcessor.cpp. References LandmarksPercept::addFlag(), ConditionalBoundary::addX(), ConditionalBoundary::addY(), Image::cameraInfo, DOT, getPlayer(), Player::getTeamColor(), isValidPoint(), CameraInfo::openingAngleWidth, CameraInfo::resolutionHeight, CameraInfo::resolutionWidth, Pose3D::rotation, sqr, Vector3< V >::x, Vector2< V >::x, Vector3< V >::y, and Vector2< V >::y. Referenced by BoxSpecialist::searchLandmark(). |
Here is the call graph for this function:
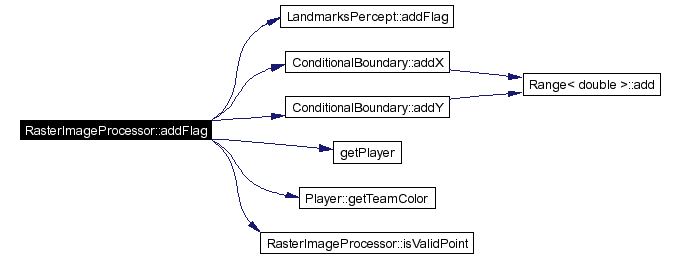
|
|
Changes the strategy. the old one will be deleted !
Definition at line 110 of file RasterImageProcessor.cpp. References waitingStrategy. |
|
|
The color-class image.
|
|
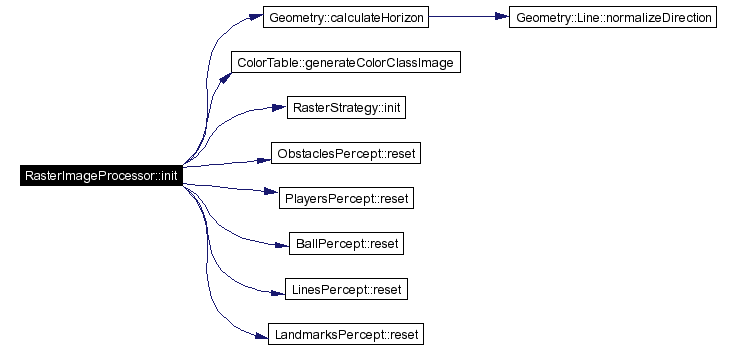
|
Initializes the module.
Definition at line 116 of file RasterImageProcessor.cpp. References Geometry::Line::base, Geometry::calculateHorizon(), Image::cameraInfo, LandmarksPercept::cameraOffset, Geometry::Line::direction, Image::frameNumber, GENERATE_DEBUG_IMAGE, ColorTable::generateColorClassImage(), RasterStrategy::init(), LINE, ObstaclesPercept::reset(), PlayersPercept::reset(), BallPercept::reset(), LinesPercept::reset(), LandmarksPercept::reset(), SEND_DEBUG_COLOR_CLASS_IMAGE, Pose3D::translation, waitingStrategy, Vector2< double >::x, and Vector2< double >::y. Referenced by execute(). |
Here is the call graph for this function:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
An edge detector.
Definition at line 52 of file RasterImageProcessor.h. |
|
|
The color-corrector.
Definition at line 54 of file RasterImageProcessor.h. |
|
|
The calculated horizon.
Definition at line 56 of file RasterImageProcessor.h. Referenced by RDefaultStrategy::postScan(), and RDefaultStrategy::preScan(). |
|
|
Minimal x-coordinate of the image-raster.
Definition at line 158 of file RasterImageProcessor.h. |
|
|
Maximal x-coordinate of the image-raster.
Definition at line 160 of file RasterImageProcessor.h. Referenced by RFieldSpecialist::checkRamp(). |
|
|
Minimal y-coordinate of the image-raster.
Definition at line 162 of file RasterImageProcessor.h. |
|
|
Maximal y-coordinate of the image-raster.
Definition at line 164 of file RasterImageProcessor.h. |
|
|
The margin between two scanlines.
Definition at line 166 of file RasterImageProcessor.h. Referenced by RDefaultStrategy::checkBall(), RDefaultStrategy::checkBox(), RDefaultStrategy::checkBridge(), RDefaultStrategy::checkPlayer(), RDefaultStrategy::preScan(), and RDefaultStrategy::RDefaultStrategy(). |
|
|
The margin between two scanlines.
Definition at line 168 of file RasterImageProcessor.h. Referenced by RDefaultStrategy::preScan(), and RDefaultStrategy::RDefaultStrategy(). |
|
|
The concurrent specialists.
Definition at line 176 of file RasterImageProcessor.h. Referenced by getSpecialist(), RasterImageProcessor(), removeSpecialist(), and setSpecialist(). |
|
|
The active strategy.
Definition at line 178 of file RasterImageProcessor.h. |
|
|
The new strategy in the next frame.
Definition at line 180 of file RasterImageProcessor.h. Referenced by changeStrategy(), init(), and RasterImageProcessor(). |
 1.3.6
1.3.6