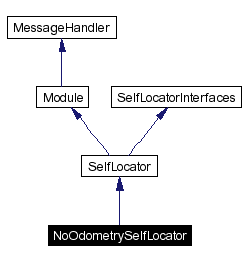
#include <NoOdometrySelfLocator.h>
Inheritance diagram for NoOdometrySelfLocator:
Public Member Functions | |
| NoOdometrySelfLocator (const SelfLocatorInterfaces &interfaces) | |
| Constructor. | |
| ~NoOdometrySelfLocator () | |
| Destructor. | |
| virtual void | execute () |
| Executes the module. | |
| bool | handleMessage (InMessage &) |
| Called from a MessageQueue to distribute messages. | |
Public Attributes | |
| double | speed |
| movement per frame | |
| int | debugflags |
| debugflags | |
| int | debugframes |
| int | refGoalFramenr |
| int | refGoalvalid |
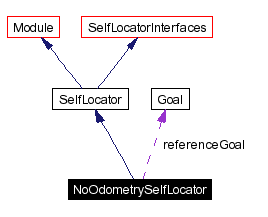
| Goal | referenceGoal |
| unsigned long int | timeOfLastExecute |
Definition at line 19 of file NoOdometrySelfLocator.h.
|
|
Constructor.
Definition at line 14 of file NoOdometrySelfLocator.cpp. |
|
|
Destructor.
Definition at line 31 of file NoOdometrySelfLocator.h. |
|
|
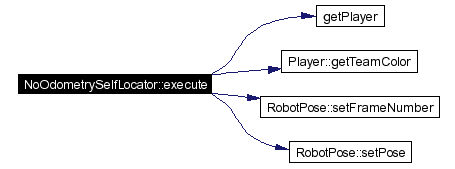
Executes the module.
Implements Module. Definition at line 19 of file NoOdometrySelfLocator.cpp. References LandmarksPercept::cameraOffset, Goal::color, debugflags, debugframes, Goal::distance, LandmarksPercept::frameNumber, getPlayer(), Player::getTeamColor(), LandmarksPercept::goals, idText, LandmarksPercept::numberOfGoals, OUTPUT, referenceGoal, refGoalFramenr, refGoalvalid, RobotPose::setFrameNumber(), RobotPose::setPose(), Pose2D::translation, Vector3< double >::x, Vector2< double >::x, Vector3< double >::y, Vector2< double >::y, and Vector3< double >::z. |
Here is the call graph for this function:
|
|
Called from a MessageQueue to distribute messages.
Reimplemented from Module. Definition at line 121 of file NoOdometrySelfLocator.cpp. References InMessage::bin, GenericDebugData::data, debugflags, debugframes, InMessage::getMessageID(), GenericDebugData::id, idGenericDebugData, idText, and OUTPUT. |
Here is the call graph for this function:

|
|
movement per frame
Definition at line 37 of file NoOdometrySelfLocator.h. |
|
|
debugflags
Definition at line 40 of file NoOdometrySelfLocator.h. Referenced by execute(), and handleMessage(). |
|
|
Definition at line 41 of file NoOdometrySelfLocator.h. Referenced by execute(), and handleMessage(). |
|
|
Definition at line 48 of file NoOdometrySelfLocator.h. Referenced by execute(). |
|
|
Definition at line 49 of file NoOdometrySelfLocator.h. Referenced by execute(). |
|
|
Definition at line 50 of file NoOdometrySelfLocator.h. Referenced by execute(). |
|
|
Definition at line 53 of file NoOdometrySelfLocator.h. |
 1.3.6
1.3.6