#include <ConstantSpeedModel.h>
Inheritance diagram for KalmanConstantSpeedModel:
Public Member Functions | |
| KalmanConstantSpeedModel () | |
| virtual | ~KalmanConstantSpeedModel () |
| virtual const char * | getModelName () const |
| Returns the name of the process model. | |
| virtual int | getStateDim () const |
| Returns the dimension of the state. | |
| virtual void | getP (double *pDest) const |
| Retrieves the internal kalman filter covariance matrix. | |
| virtual void | getQ (double *pDest) const |
| Retrieves the process error covariance matrix. | |
| virtual void | setQ (const double *pSource) |
| Sets the process error covariance matrix. | |
| virtual void | getR (double *pDest) const |
| Retrieves the measurement error covariance matrix. | |
| virtual void | setR (double *pSource) |
| Sets the measurement error covariance matrix. | |
| virtual void | reset () |
| Resets the process model. | |
| virtual KalmanUpdateResult | update (double time, double x, double y, const RobotPose &pose, double panningVelocity) |
| Performs an update step of the process model. | |
| virtual KalmanPredictResult | predict (double time) |
| Permorms a prediction of the ball state. | |
| virtual void | adapt (const OdometryData &lastOdometry, const OdometryData &actualOdometry) |
| Function to adapt the state of the model when position and rotation of the robot changes. | |
Private Types | |
| enum | InitState { NotInited, PositionInited, Ready } |
Private Member Functions | |
| void | calculateVarianceAdaptionPolynom (double x[2], double fx[2], double result[2]) |
| Calculates the coefficients for the variance adpation Polynom. | |
Private Attributes | |
| const double | panningVelocityThreshold |
| Vector_n< double, 4 > | x_act |
| Actual state: x_act[0] is x-position in meters relative to robot x_act[1] is y-position in meters relative to robot x_act[2] is x-direction speed in meters per second x_act[3] is y-direction speed in meters per second. | |
| Vector_n< double, 4 > | z |
| measured state | |
| Matrix_nxn< double, 4 > | A |
| linear process model matrix | |
| Matrix_nxn< double, 4 > | P |
| internal covariance matrix | |
| Matrix_nxn< double, 4 > | Q |
| process model error covariance matrix | |
| Matrix_nxn< double, 4 > | R |
| measurement error covariance matrix | |
| InitState | initState |
| initialization state of the filter | |
| double | lastLiklihood |
| last liklihood of model (for predict function) | |
| double | lastTime |
| last time update permormed | |
| Vector_n< double, 4 > | x_minus |
| Matrix_nxn< double, 4 > | P_minus |
| Matrix_nxn< double, 4 > | K |
| Vector_n< double, 4 > | x_predict |
| Matrix_nxn< double, 4 > | C |
| Matrix_nxn< double, 4 > | C_inv |
| Matrix_nxn< double, 4 > | globQ |
| global process covariance matrix that is adapted with dt | |
| Matrix_nxn< double, 4 > | globR |
| global measurement covariance matrix | |
| double | varianceAdaptionPosition [3] |
| Coefficients of polynom of degree 2 for variance adaption Constant coefficient is the last one. | |
| double | varianceAdaptionSpeed [3] |
Static Private Attributes | |
| double | defaultA [16] |
| default linear process model matrix | |
| double | defaultP [16] |
| default internal covariance matrix | |
| double | defaultQ [16] |
| default process error covariance matrix | |
| double | defaultR [16] |
| default measurement error covariance matrix | |
Definition at line 22 of file ConstantSpeedModel.h.
|
|
Definition at line 73 of file ConstantSpeedModel.h. |
|
|
Definition at line 48 of file ConstantSpeedModel.cpp. References A, calculateVarianceAdaptionPolynom(), defaultA, defaultQ, defaultR, globQ, globR, pi, reset(), varianceAdaptionPosition, and varianceAdaptionSpeed. |
Here is the call graph for this function:

|
|
Definition at line 82 of file ConstantSpeedModel.cpp. |
|
|
Returns the name of the process model.
Implements KalmanProcessModelBase. Definition at line 29 of file ConstantSpeedModel.h. |
|
|
Returns the dimension of the state.
Implements KalmanProcessModelBase. Definition at line 31 of file ConstantSpeedModel.h. |
|
|
Retrieves the internal kalman filter covariance matrix.
Implements KalmanProcessModelBase. Definition at line 32 of file ConstantSpeedModel.h. References Matrix_nxn< double, 4 >::copyTo(), and P. |
Here is the call graph for this function:

|
|
Retrieves the process error covariance matrix.
Implements KalmanProcessModelBase. Definition at line 33 of file ConstantSpeedModel.h. References Matrix_nxn< double, 4 >::copyTo(), and globQ. |
Here is the call graph for this function:

|
|
Sets the process error covariance matrix.
Implements KalmanProcessModelBase. Definition at line 34 of file ConstantSpeedModel.h. References globQ. |
|
|
Retrieves the measurement error covariance matrix.
Implements KalmanProcessModelBase. Definition at line 35 of file ConstantSpeedModel.h. References Matrix_nxn< double, 4 >::copyTo(), and globR. |
Here is the call graph for this function:

|
|
Sets the measurement error covariance matrix.
Implements KalmanProcessModelBase. Definition at line 36 of file ConstantSpeedModel.h. References globR. |
|
|
Resets the process model.
Implements KalmanProcessModelBase. Definition at line 102 of file ConstantSpeedModel.cpp. References defaultP, initState, lastLiklihood, NotInited, P, and x_act. Referenced by KalmanConstantSpeedModel(), predict(), and update(). |
|
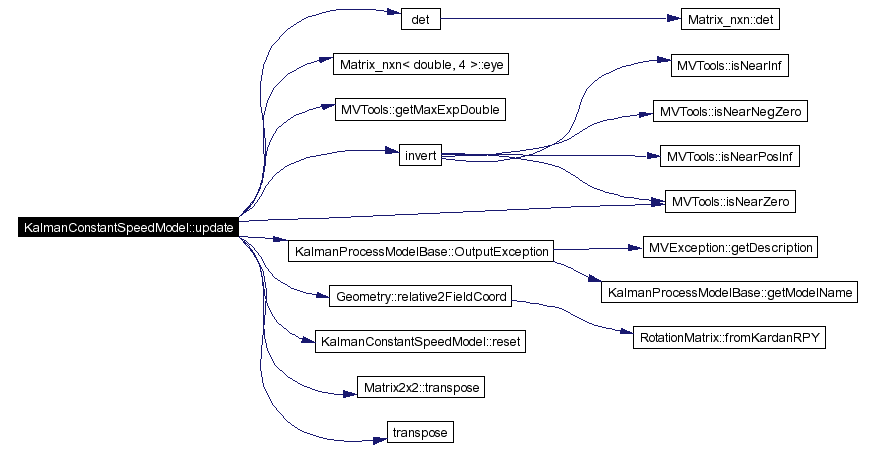
||||||||||||||||||||||||
Here is the call graph for this function:
|
|
Permorms a prediction of the ball state.
Implements KalmanProcessModelBase. Definition at line 328 of file ConstantSpeedModel.cpp. References A, initState, lastLiklihood, KalmanPredictResult::liklihood, KalmanProcessModelBase::OutputException(), Ready, reset(), KalmanPredictResult::state, KalmanBallState::vx, KalmanBallState::vy, KalmanBallState::x, x_act, x_predict, and KalmanBallState::y. |
Here is the call graph for this function:

|
||||||||||||
|
Function to adapt the state of the model when position and rotation of the robot changes.
Implements KalmanProcessModelBase. Definition at line 366 of file ConstantSpeedModel.cpp. References Pose2D::getAngle(), Vector2< V >::x, x_act, and Vector2< V >::y. |
Here is the call graph for this function:

|
||||||||||||||||
|
Calculates the coefficients for the variance adpation Polynom.
Definition at line 86 of file ConstantSpeedModel.cpp. References A, and Matrix_nxn< T, N >::solve(). Referenced by KalmanConstantSpeedModel(). |
Here is the call graph for this function:

|
|
Definition at line 57 of file ConstantSpeedModel.h. Referenced by update(). |
|
|
Actual state: x_act[0] is x-position in meters relative to robot x_act[1] is y-position in meters relative to robot x_act[2] is x-direction speed in meters per second x_act[3] is y-direction speed in meters per second.
Definition at line 66 of file ConstantSpeedModel.h. |
|
|
measured state
Definition at line 67 of file ConstantSpeedModel.h. |
|
|
linear process model matrix
Definition at line 68 of file ConstantSpeedModel.h. Referenced by calculateVarianceAdaptionPolynom(), KalmanConstantSpeedModel(), predict(), and update(). |
|
|
internal covariance matrix
Definition at line 69 of file ConstantSpeedModel.h. |
|
|
process model error covariance matrix
Definition at line 70 of file ConstantSpeedModel.h. Referenced by update(). |
|
|
measurement error covariance matrix
Definition at line 71 of file ConstantSpeedModel.h. Referenced by update(). |
|
|
initialization state of the filter
Definition at line 79 of file ConstantSpeedModel.h. |
|
|
last liklihood of model (for predict function)
Definition at line 80 of file ConstantSpeedModel.h. |
|
|
last time update permormed
Definition at line 81 of file ConstantSpeedModel.h. |
|
|
Definition at line 84 of file ConstantSpeedModel.h. Referenced by update(). |
|
|
Definition at line 85 of file ConstantSpeedModel.h. Referenced by update(). |
|
|
Definition at line 86 of file ConstantSpeedModel.h. Referenced by update(). |
|
|
Definition at line 87 of file ConstantSpeedModel.h. Referenced by predict(). |
|
|
Definition at line 88 of file ConstantSpeedModel.h. Referenced by update(). |
|
|
Definition at line 89 of file ConstantSpeedModel.h. Referenced by update(). |
|
|
global process covariance matrix that is adapted with dt
Definition at line 92 of file ConstantSpeedModel.h. Referenced by getQ(), KalmanConstantSpeedModel(), setQ(), and update(). |
|
|
global measurement covariance matrix
Definition at line 94 of file ConstantSpeedModel.h. Referenced by getR(), KalmanConstantSpeedModel(), setR(), and update(). |
|
|
Coefficients of polynom of degree 2 for variance adaption Constant coefficient is the last one.
Definition at line 100 of file ConstantSpeedModel.h. Referenced by KalmanConstantSpeedModel(), and update(). |
|
|
Definition at line 101 of file ConstantSpeedModel.h. Referenced by KalmanConstantSpeedModel(), and update(). |
|
|
Initial value:
{
1.0, 0.0, 0.0, 0.0,
0.0, 1.0, 0.0, 0.0,
0.0, 0.0, 1.0, 0.0,
0.0, 0.0, 0.0, 1.0
}
Definition at line 13 of file ConstantSpeedModel.cpp. Referenced by KalmanConstantSpeedModel(). |
|
|
Initial value:
{
1.0, 0.0, 0.0, 0.0,
0.0, 1.0, 0.0, 0.0,
0.0, 0.0, 1.0, 0.0,
0.0, 0.0, 0.0, 1.0
}
Definition at line 21 of file ConstantSpeedModel.cpp. Referenced by reset(). |
|
|
Initial value:
{
0.004, 0.000, 0.004, 0.000,
0.000, 0.004, 0.000, 0.004,
0.004, 0.000, 0.004, 0.000,
0.000, 0.004, 0.000, 0.004
}
Definition at line 31 of file ConstantSpeedModel.cpp. Referenced by KalmanConstantSpeedModel(). |
|
|
Initial value:
{
0.01*0.01, 0.00*0.00, 0.00*0.00, 0.00*0.00,
0.00*0.00, 0.01*0.01, 0.00*0.00, 0.00*0.00,
0.00*0.00, 0.00*0.00, 0.03*0.03, 0.00*0.00,
0.00*0.00, 0.00*0.00, 0.00*0.00, 0.03*0.03
}
Definition at line 40 of file ConstantSpeedModel.cpp. Referenced by KalmanConstantSpeedModel(). |
 1.3.6
1.3.6