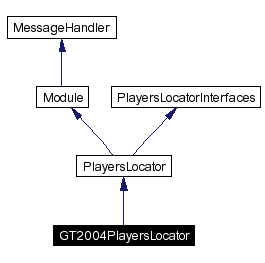
#include <GT2004PlayersLocator.h>
Inheritance diagram for GT2004PlayersLocator:
Public Types | |
| enum | { NUMBER_OF_OWN_PLAYERS_TO_LOCATE = 3, NUMBER_OF_OPPONENT_PLAYERS_TO_LOCATE = 4 } |
| Constants for the number of robots in the own and in the opponent´s team. More... | |
| enum | { NUMBER_OF_POINTS_FOR_OWN_PLAYERS = 150, NUMBER_OF_POINTS_FOR_OPPONENT_PLAYERS = 200 } |
Public Member Functions | |
| GT2004PlayersLocator (const PlayersLocatorInterfaces &interfaces) | |
| Constructor. | |
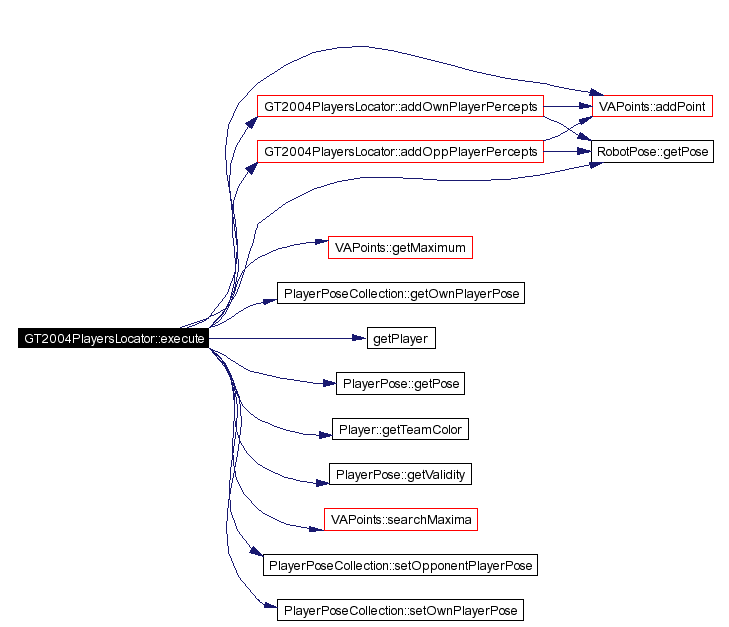
| virtual void | execute () |
| Executes the module. | |
Static Public Attributes | |
| const double | TEAM_MESSAGE_VALIDITY = 0.3 |
| const double | MIN_MATCH_DIST = 500 |
Private Member Functions | |
| bool | correctObstaclePosition (int oldX, int oldY, int &newX, int &newY) |
| Corrects the position of players. | |
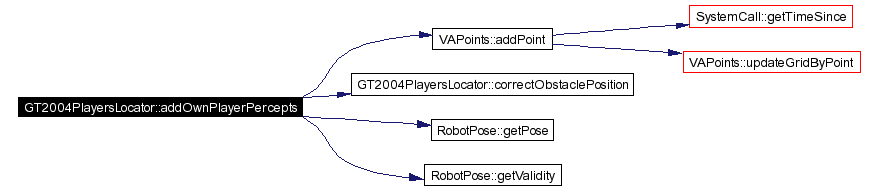
| void | addOwnPlayerPercepts (const SinglePlayerPercept playerPercepts[], int numberOfPlayerPercepts, const RobotPose &startRobotPose, const double collectionValidity, const unsigned long collectionTimestamp) |
| void | addOppPlayerPercepts (const SinglePlayerPercept playerPercepts[], int numberOfPlayerPercepts, const RobotPose &startRobotPose, const double collectionValidity, const unsigned long collectionTimestamp) |
Private Attributes | |
| TeamMessage | teamMessage [NUMBER_OF_OWN_PLAYERS_TO_LOCATE] |
| VAPoints | opponentPointsWithValidityAndAge |
| The points with validity and age for determining the position of robots of the own team. | |
| VAPoints | ownPointsWithValidityAndAge |
| The points with validity and age for determining the position of robots of the opponent´s team. | |
It can assign the detected percepts to the players (even if they are not seen for two seconds), using points with validity and age.
Definition at line 22 of file GT2004PlayersLocator.h.
|
|
Constants for the number of robots in the own and in the opponent´s team.
Definition at line 29 of file GT2004PlayersLocator.h. |
|
|
Definition at line 31 of file GT2004PlayersLocator.h. |
|
|
Constructor.
Definition at line 20 of file GT2004PlayersLocator.cpp. |
|
Here is the call graph for this function:
|
||||||||||||||||||||
|
Corrects the position of players. When the calculated position of a robot lies outside the playingfiled it is corrected to the nearby groundline.
Definition at line 140 of file GT2004PlayersLocator.cpp. Referenced by addOppPlayerPercepts(), and addOwnPlayerPercepts(). |
|
||||||||||||||||||||||||
|
Definition at line 189 of file GT2004PlayersLocator.cpp. References VAPoints::addPoint(), correctObstaclePosition(), RobotPose::getPose(), RobotPose::getValidity(), ownPointsWithValidityAndAge, Vector2< V >::x, and Vector2< V >::y. Referenced by execute(). |
Here is the call graph for this function:
|
||||||||||||||||||||||||
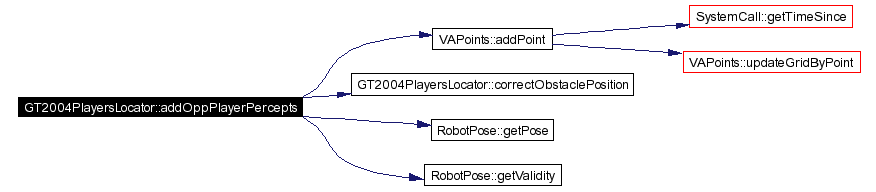
|
Definition at line 222 of file GT2004PlayersLocator.cpp. References VAPoints::addPoint(), correctObstaclePosition(), RobotPose::getPose(), RobotPose::getValidity(), opponentPointsWithValidityAndAge, Vector2< V >::x, and Vector2< V >::y. Referenced by execute(). |
Here is the call graph for this function:
|
|
Definition at line 17 of file GT2004PlayersLocator.cpp. |
|
|
Definition at line 18 of file GT2004PlayersLocator.cpp. Referenced by execute(). |
|
|
Definition at line 44 of file GT2004PlayersLocator.h. |
|
|
The points with validity and age for determining the position of robots of the own team.
Definition at line 50 of file GT2004PlayersLocator.h. Referenced by addOppPlayerPercepts(), and execute(). |
|
|
The points with validity and age for determining the position of robots of the opponent´s team.
Definition at line 55 of file GT2004PlayersLocator.h. Referenced by addOwnPlayerPercepts(), and execute(). |
 1.3.6
1.3.6