#include <TeamMessage.h>
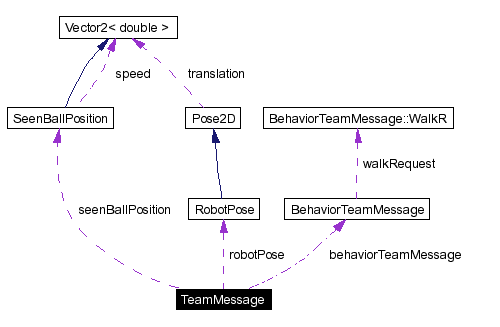
Inheritance diagram for TeamMessage:
Public Member Functions | |
| TeamMessage () | |
| Constructor. | |
| bool | isActual () const |
| The function determines, whether the team message is actual. | |
| long | getTimeStampInOwnTime () const |
| This function returns the time of the remote player in the time system of the local player. | |
| long | getTimeInOwnTime (long time) const |
| This function converts a remote timeStamp to the local time system. | |
| long | getTimeInRemoteTime (long time) const |
| This function converts a local timeStamp to the remote time system. | |
Public Attributes | |
| unsigned | timeStamp |
| The time stamp of the sending robot. | |
| unsigned | lastReceivedTimeStamp |
| The timeStamp of the last package received from the receiving robot. | |
| unsigned | incomingTimeStamp |
| The local receiving time of the last package received from the receiving robot. | |
| RobotPose | robotPose |
| The robot pose of the robot. | |
| bool | sendRobotPose |
| Send robotPose if true. | |
| SeenBallPosition | seenBallPosition |
| The ball seen by the robot. | |
| bool | sendSeenBallPosition |
| Send seenBallPosition if true. | |
| BehaviorTeamMessage | behaviorTeamMessage |
| Messages by the behavior. | |
| bool | sendBehaviorTeamMessage |
| Send behaviorTeamMessage if true. | |
| signed long | timeOffset |
| timeOffset Remote time - local time | |
| Player::playerNumber | playerNumberOfSender |
| The player number of the Sender. | |
Static Private Member Functions | |
| void | read (In &stream, Vector2< double > &v) |
| void | read (In &stream, Pose2D &p) |
| void | write (Out &stream, const Vector2< double > &v) |
| void | write (Out &stream, const Pose2D &p) |
Friends | |
| In & | operator>> (In &stream, TeamMessage &teamMessage) |
| Streaming operator that reads a team message from a stream. | |
| Out & | operator<< (Out &stream, const TeamMessage &teamMessage) |
| Streaming operator that writes a team message to a stream. | |
Definition at line 44 of file TeamMessage.h.
|
|
Constructor.
Definition at line 68 of file TeamMessage.h. References incomingTimeStamp, lastReceivedTimeStamp, sendBehaviorTeamMessage, sendRobotPose, and sendSeenBallPosition. |
|
|
The function determines, whether the team message is actual.
Definition at line 14 of file TeamMessage.cpp. References SystemCall::getTimeSince(), and lastReceivedTimeStamp. Referenced by TeamMessageCollection::processMessages(). |
Here is the call graph for this function:

|
|
This function returns the time of the remote player in the time system of the local player.
Definition at line 120 of file TeamMessage.cpp. References timeOffset. |
|
|
This function converts a remote timeStamp to the local time system.
Definition at line 125 of file TeamMessage.cpp. References timeOffset. |
|
|
This function converts a local timeStamp to the remote time system.
Definition at line 130 of file TeamMessage.cpp. References timeOffset. |
|
||||||||||||
|
Definition at line 93 of file TeamMessage.cpp. References Vector2< V >::x, and Vector2< V >::y. Referenced by operator>>(), and read(). |
|
||||||||||||
|
Definition at line 101 of file TeamMessage.cpp. References read(), Pose2D::rotation, and Pose2D::translation. |
Here is the call graph for this function:

|
||||||||||||
|
Definition at line 109 of file TeamMessage.cpp. References Vector2< V >::x, and Vector2< V >::y. Referenced by operator<<(), and write(). |
|
||||||||||||
|
Definition at line 114 of file TeamMessage.cpp. References Pose2D::rotation, Pose2D::translation, and write(). |
Here is the call graph for this function:

|
||||||||||||
|
Streaming operator that reads a team message from a stream.
Definition at line 19 of file TeamMessage.cpp. |
|
||||||||||||
|
Streaming operator that writes a team message to a stream.
Definition at line 58 of file TeamMessage.cpp. |
|
|
The time stamp of the sending robot.
Definition at line 48 of file TeamMessage.h. Referenced by operator<<(), operator>>(), TeamMessageCollection::processOutMessages(), and TeamMessageCollection::processTimeStamps(). |
|
|
The timeStamp of the last package received from the receiving robot.
Definition at line 48 of file TeamMessage.h. Referenced by isActual(), operator<<(), operator>>(), TeamMessageCollection::processTimeStamps(), and TeamMessage(). |
|
|
The local receiving time of the last package received from the receiving robot.
Definition at line 48 of file TeamMessage.h. Referenced by operator<<(), operator>>(), TeamMessageCollection::processTimeStamps(), and TeamMessage(). |
|
|
The robot pose of the robot.
Definition at line 52 of file TeamMessage.h. Referenced by operator<<(), operator>>(), and TeamMessageCollection::send(). |
|
|
Send robotPose if true.
Definition at line 53 of file TeamMessage.h. Referenced by operator<<(), operator>>(), TeamMessageCollection::send(), and TeamMessage(). |
|
|
The ball seen by the robot.
Definition at line 55 of file TeamMessage.h. Referenced by operator<<(), operator>>(), and TeamMessageCollection::send(). |
|
|
Send seenBallPosition if true.
Definition at line 56 of file TeamMessage.h. Referenced by operator<<(), operator>>(), TeamMessageCollection::send(), and TeamMessage(). |
|
|
Messages by the behavior.
Definition at line 58 of file TeamMessage.h. Referenced by operator<<(), operator>>(), and TeamMessageCollection::send(). |
|
|
Send behaviorTeamMessage if true.
Definition at line 59 of file TeamMessage.h. Referenced by operator<<(), operator>>(), TeamMessageCollection::send(), and TeamMessage(). |
|
|
timeOffset Remote time - local time
Definition at line 61 of file TeamMessage.h. Referenced by getTimeInOwnTime(), getTimeInRemoteTime(), and getTimeStampInOwnTime(). |
|
|
The player number of the Sender.
Definition at line 63 of file TeamMessage.h. Referenced by operator>>(). |
 1.3.6
1.3.6