#include <GT2004EvolutionBasicBehaviors.h>
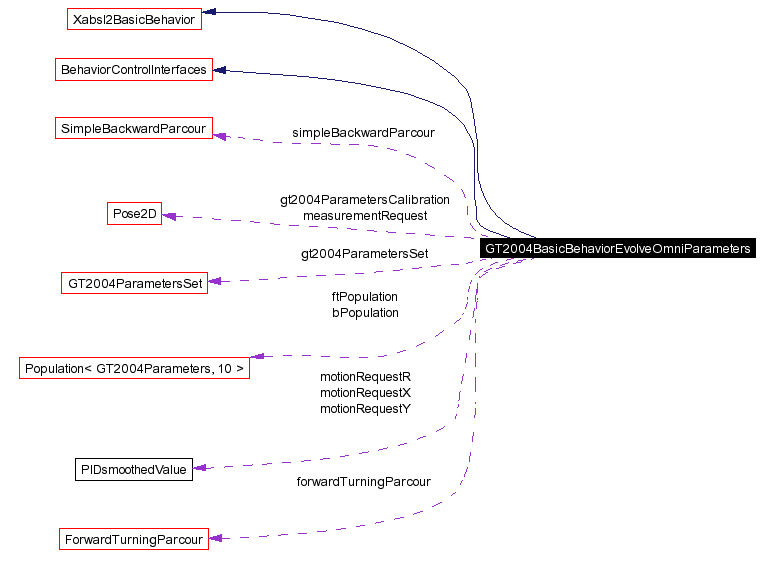
Inheritance diagram for GT2004BasicBehaviorEvolveOmniParameters:
Public Member Functions | |
| GT2004BasicBehaviorEvolveOmniParameters (const BehaviorControlInterfaces &interfaces, Xabsl2ErrorHandler &errorHandler, GT2004ParametersSet >2004ParametersSet, Pose2D *gt2004ParametersCalibration, int >2004CurrentIndex, Pose2D &measurementRequest, int &evolutionMode) | |
| virtual void | execute () |
| Executes the basic behavior. | |
Private Attributes | |
| Population< GT2004Parameters, 10 > | ftPopulation |
| a Polpulation of WalkingParameters | |
| Population< GT2004Parameters, 10 > | bPopulation |
| double | mode |
| specifies whether the robot should walk forward or backward or parameters should be changed | |
| int | lastMode |
| ForwardTurningParcour | forwardTurningParcour |
| SimpleBackwardParcour | simpleBackwardParcour |
| PIDsmoothedValue | motionRequestX |
| PIDsmoothedValue | motionRequestY |
| PIDsmoothedValue | motionRequestR |
| GT2004ParametersSet & | gt2004ParametersSet |
| GT2004 Evolution stuff. | |
| Pose2D * | gt2004ParametersCalibration |
| int & | gt2004CurrentIndex |
| Pose2D & | measurementRequest |
| int & | evolutionMode |
Definition at line 139 of file GT2004EvolutionBasicBehaviors.h.
|
||||||||||||||||||||||||||||||||
|
Definition at line 147 of file GT2004EvolutionBasicBehaviors.h. References bPopulation, InFile::exists(), ftPopulation, GT2004Parameters::index, Population< GT2004Parameters, 10 >::individual, lastMode, motionRequestR, motionRequestX, motionRequestY, Individual::mutationOf(), pi, and Xabsl2BasicBehavior::registerParameter(). |
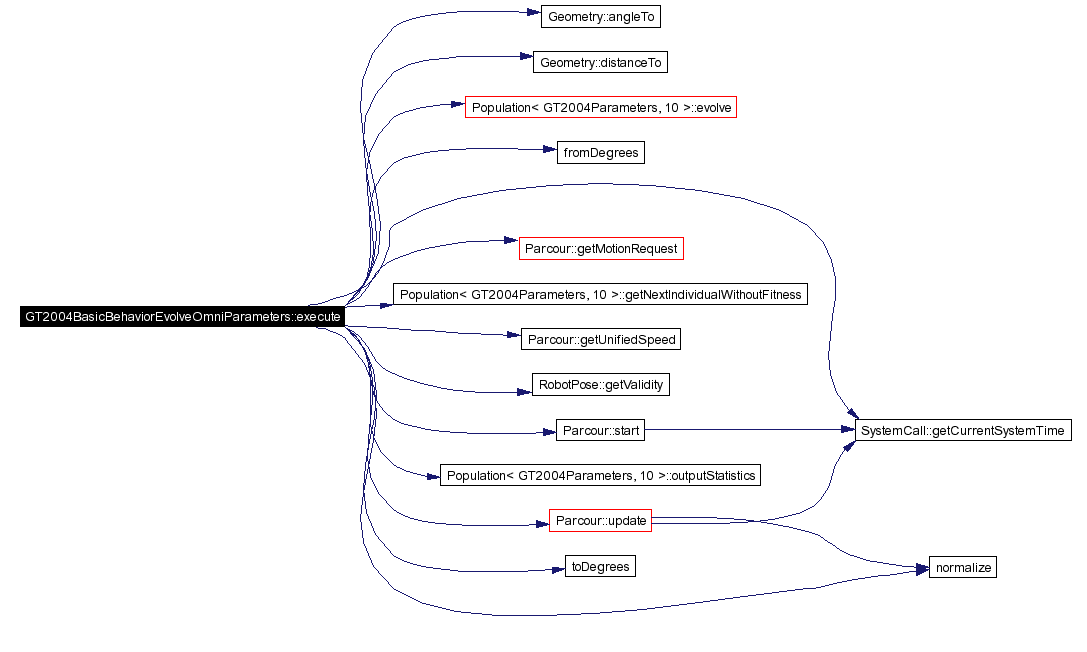
Here is the call graph for this function:

|
Here is the call graph for this function:
|
|
a Polpulation of WalkingParameters
Definition at line 201 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(), and GT2004BasicBehaviorEvolveOmniParameters(). |
|
|
Definition at line 202 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(), and GT2004BasicBehaviorEvolveOmniParameters(). |
|
|
specifies whether the robot should walk forward or backward or parameters should be changed
Definition at line 205 of file GT2004EvolutionBasicBehaviors.h. |
|
|
Definition at line 206 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(), and GT2004BasicBehaviorEvolveOmniParameters(). |
|
|
Definition at line 208 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(). |
|
|
Definition at line 209 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(). |
|
|
Definition at line 210 of file GT2004EvolutionBasicBehaviors.h. Referenced by GT2004BasicBehaviorEvolveOmniParameters(). |
|
|
Definition at line 210 of file GT2004EvolutionBasicBehaviors.h. Referenced by GT2004BasicBehaviorEvolveOmniParameters(). |
|
|
Definition at line 210 of file GT2004EvolutionBasicBehaviors.h. Referenced by GT2004BasicBehaviorEvolveOmniParameters(). |
|
|
GT2004 Evolution stuff.
Definition at line 213 of file GT2004EvolutionBasicBehaviors.h. |
|
|
Definition at line 214 of file GT2004EvolutionBasicBehaviors.h. |
|
|
Definition at line 215 of file GT2004EvolutionBasicBehaviors.h. |
|
|
Definition at line 216 of file GT2004EvolutionBasicBehaviors.h. |
|
|
Definition at line 217 of file GT2004EvolutionBasicBehaviors.h. |
 1.3.6
1.3.6