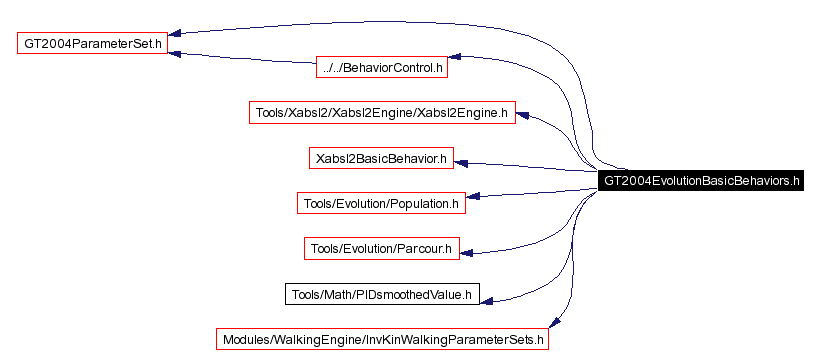
#include "../../BehaviorControl.h"
#include "Tools/Xabsl2/Xabsl2Engine/Xabsl2Engine.h"
#include "Tools/Xabsl2/Xabsl2Engine/Xabsl2BasicBehavior.h"
#include "Tools/Evolution/Population.h"
#include "Tools/Evolution/Parcour.h"
#include "Tools/Math/PIDsmoothedValue.h"
#include "Modules/WalkingEngine/GT2004ParameterSet.h"
#include "Modules/WalkingEngine/InvKinWalkingParameterSets.h"
Include dependency graph for GT2004EvolutionBasicBehaviors.h:
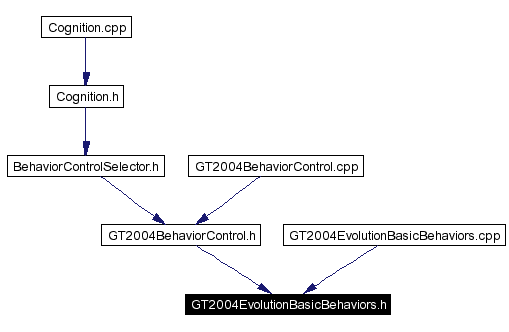
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | GT2004BasicBehaviorMeasureGT2004Parameters |
| A BasicBehavior for measuring and calibrating an the current GT2004Parameters. More... | |
| class | GT2004BasicBehaviorMeasureGT2004ParametersBlind |
| A BasicBehavior for measuring and calibrating an the current GT2004Parameters while being partially blind (while turning). More... | |
| class | GT2004BasicBehaviorEvolveOmniParameters |
| A BasicBehavior for walking forward or backward following a certain parcour as well as changing walking parameters according to the fitness measured in the last parcour walk This Basic Behavior needs a walking engine that does not switch parameters according to the MotionRequest (like InvKin:GT2003 and GT2004), but a non-switching one (like InvKin:FF). More... | |
| class | GT2004BasicBehaviorSendCurrentGT2004ParametersAndChooseNext |
| A BasicBehavior for sending the current GT2004Parameters via PackageCognitionMotion to the walking engine and choose the next Parameters to be optimized. More... | |
| class | GT2004BasicBehaviorNextGT2004ParametersToBeMeasured |
| A BasicBehavior for generating the next GT2004Parameters to be measured exactly. More... | |
| class | GT2004EvolutionBasicBehaviors |
| Creates and registers simple basic behaviors. More... | |
Definition in file GT2004EvolutionBasicBehaviors.h.
 1.3.6
1.3.6