#include <GT2004EvolutionBasicBehaviors.h>
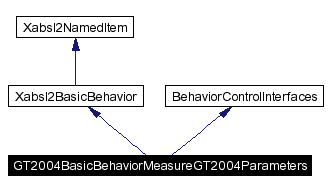
Inheritance diagram for GT2004BasicBehaviorMeasureGT2004Parameters:
Public Member Functions | |
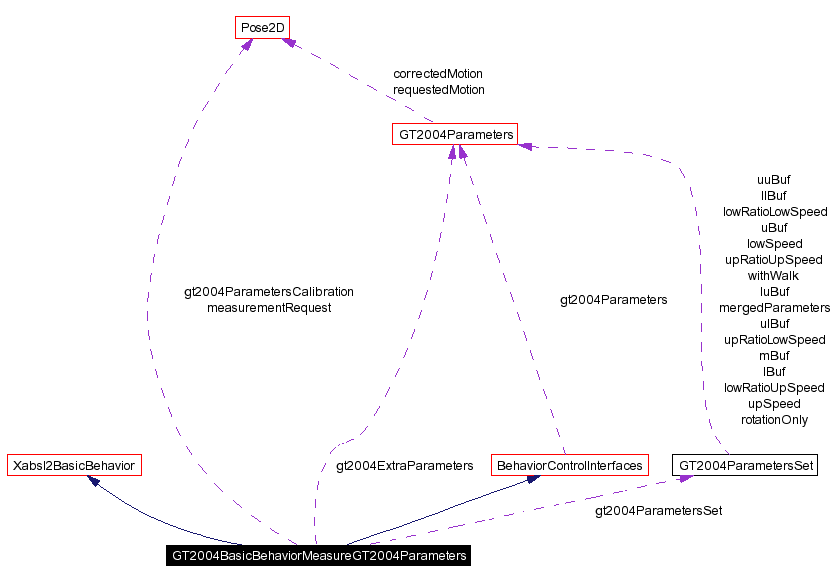
| GT2004BasicBehaviorMeasureGT2004Parameters (const BehaviorControlInterfaces &interfaces, Xabsl2ErrorHandler &errorHandler, GT2004ParametersSet >2004ParametersSet, GT2004Parameters >2004ExtraParameters, Pose2D *gt2004ParametersCalibration, int >2004CurrentIndex, Pose2D &measurementRequest, int &evolutionMode) | |
| virtual void | execute () |
| Executes the basic behavior. | |
Private Attributes | |
| unsigned long | startFrameNumber |
| robotPose frame number of first call of this beasic behavior in current measurement | |
| unsigned long | lastFrameNumber |
| robotPose frame number of last call of this beasic behavior in current measurement | |
| double | x0 |
| local variables to store measurement start position | |
| double | y0 |
| local variables to store measurement start position | |
| double | r0 |
| local variables to store measurement start position | |
| double | t0 |
| local variables to store measurement start position | |
| GT2004ParametersSet & | gt2004ParametersSet |
| GT2004 Evolution stuff. | |
| GT2004Parameters & | gt2004ExtraParameters |
| Pose2D * | gt2004ParametersCalibration |
| int & | gt2004CurrentIndex |
| Pose2D & | measurementRequest |
| int & | evolutionMode |
Definition at line 25 of file GT2004EvolutionBasicBehaviors.h.
|
||||||||||||||||||||||||||||||||||||
|
Definition at line 33 of file GT2004EvolutionBasicBehaviors.h. References startFrameNumber. |
|
|
Executes the basic behavior.
Implements Xabsl2BasicBehavior. Definition at line 320 of file GT2004EvolutionBasicBehaviors.cpp. References GT2004Parameters::correctedMotion, evolutionMode, RobotPose::frameNumber, SystemCall::getCurrentSystemTime(), GT2004ParametersSet::getParameters(), RobotPose::getValidity(), gt2004CurrentIndex, gt2004ExtraParameters, gt2004ParametersCalibration, gt2004ParametersSet, idGT2004Parameters, idText, measurementRequest, MotionRequest::motionType, OUTPUT, r0, Pose2D::rotation, startFrameNumber, t0, Pose2D::translation, WalkRequest::walkParams, MotionRequest::walkRequest, WalkRequest::walkType, Vector2< double >::x, x0, Vector2< double >::y, and y0. |
Here is the call graph for this function:

|
|
robotPose frame number of first call of this beasic behavior in current measurement
Definition at line 56 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(), and GT2004BasicBehaviorMeasureGT2004Parameters(). |
|
|
robotPose frame number of last call of this beasic behavior in current measurement
Definition at line 58 of file GT2004EvolutionBasicBehaviors.h. |
|
|
local variables to store measurement start position
Definition at line 60 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(). |
|
|
local variables to store measurement start position
Definition at line 60 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(). |
|
|
local variables to store measurement start position
Definition at line 60 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(). |
|
|
local variables to store measurement start position
Definition at line 60 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(). |
|
|
GT2004 Evolution stuff.
Definition at line 63 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(). |
|
|
Definition at line 64 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(). |
|
|
Definition at line 65 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(). |
|
|
Definition at line 66 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(). |
|
|
Definition at line 67 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(). |
|
|
Definition at line 68 of file GT2004EvolutionBasicBehaviors.h. Referenced by execute(). |
 1.3.6
1.3.6