#include <RobotConfiguration.h>
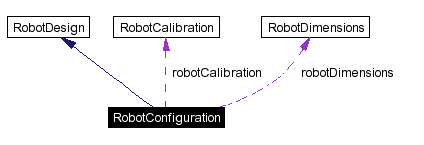
Inheritance diagram for RobotConfiguration:
Public Member Functions | |
| RobotConfiguration () | |
| Constructor. | |
| void | load () |
| Loads the data from robot.cfg. | |
| const RobotCalibration & | getRobotCalibration () const |
| returns the calibration values of the robot | |
| void | setRobotCalibration (const RobotCalibration &r) |
| sets the calibration values of the robot | |
| const char * | getMacAddressString () const |
| returns the mac address of the robot | |
| Design | getRobotDesign () const |
| returns the design of the robot | |
| const RobotDimensions & | getRobotDimensions () const |
| returns the dimensions of the robot | |
| bool | handleMessage (InMessage &message) |
| updates the robot configuration based on message queue data. | |
Private Attributes | |
| RobotCalibration | robotCalibration |
| The calibration values of the robot. | |
| char | macAddressString [13] |
| The MAC address of the robot. | |
| Design | robotDesign |
| The design of the robot. | |
| RobotDimensions | robotDimensions |
| The dimensions of the robot. | |
Definition at line 71 of file RobotConfiguration.h.
|
|
Constructor.
Definition at line 23 of file RobotConfiguration.cpp. |
|
|
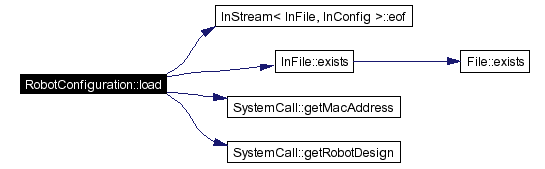
Loads the data from robot.cfg.
Definition at line 28 of file RobotConfiguration.cpp. References RobotCalibration::bodyRollOffset, RobotCalibration::bodyTiltOffset, InStream< InFile, InConfig >::eof(), InFile::exists(), SystemCall::getMacAddress(), SystemCall::getRobotDesign(), RobotCalibration::headRollOffset, RobotCalibration::headTiltOffset, macAddressString, RobotCalibration::panFactor, robotCalibration, robotDesign, robotDimensions, RobotCalibration::tilt2Factor, and RobotCalibration::tiltFactor. Referenced by Process::Process(). |
Here is the call graph for this function:
|
|
returns the calibration values of the robot
Definition at line 85 of file RobotConfiguration.h. References robotCalibration. Referenced by Kinematics::calculateCameraMatrix(), InvKinWalkingEngine::executeParameterized(), and GT2004WalkingEngine::executeParameterized(). |
|
|
sets the calibration values of the robot
Definition at line 88 of file RobotConfiguration.h. References robotCalibration. Referenced by CalibrationIndividual::select(). |
|
|
returns the mac address of the robot
Definition at line 91 of file RobotConfiguration.h. References macAddressString. |
|
|
returns the design of the robot
Definition at line 94 of file RobotConfiguration.h. References robotDesign. Referenced by Kinematics::calculateCameraMatrix(), GT2004GetupEngine::executeParameterized(), GT2004ParametersSet::load(), GT2004ParametersSet::save(), and PIDData::setToDefaults(). |
|
|
|
updates the robot configuration based on message queue data.
Definition at line 65 of file RobotConfiguration.cpp. References InMessage::bin, RobotCalibration::bodyRollOffset, RobotCalibration::bodyTiltOffset, GenericDebugData::data, InMessage::getMessageID(), RobotCalibration::headRollOffset, RobotCalibration::headTiltOffset, idBodyOffsets, RobotCalibration::panFactor, robotCalibration, RobotCalibration::tilt2Factor, and RobotCalibration::tiltFactor. Referenced by Motion::handleMessage(), and Cognition::handleMessage(). |
Here is the call graph for this function:

|
|
The calibration values of the robot.
Definition at line 103 of file RobotConfiguration.h. Referenced by getRobotCalibration(), handleMessage(), load(), and setRobotCalibration(). |
|
|
The MAC address of the robot.
Definition at line 104 of file RobotConfiguration.h. Referenced by getMacAddressString(), and load(). |
|
|
The design of the robot.
Definition at line 105 of file RobotConfiguration.h. Referenced by getRobotDesign(), and load(). |
|
|
The dimensions of the robot.
Definition at line 106 of file RobotConfiguration.h. Referenced by getRobotDimensions(), and load(). |
 1.3.6
1.3.6