#include <Parcour.h>
Inheritance diagram for Parcour:
Public Member Functions | |
| Parcour () | |
| Constructor. | |
| ~Parcour () | |
| Destructor. | |
| void | start () |
| start walking on the parcour: set start time, reset fitness stuff | |
| void | update (Pose2D robotPose, Vector3< double > accel, bool blind) |
| update the state of the parcour with all current data | |
| Pose2D | getMotionRequest () |
| return a MotionRequest that is useful at the moment to follow the parcour | |
| double | getUnifiedSpeed () |
| return something like speed in mm/s considering a useful portion of the integral errors | |
| virtual Pose2D | getTargetPose (unsigned long targetTime)=0 |
Public Attributes | |
| unsigned long | updateCount |
| unsigned long | startTime |
| unsigned long | lastTime |
| Pose2D | lastRobotPose |
| double | minX |
| double | maxX |
| double | yDiffIntegral |
| double | arcDiffIntegral |
| int | blindCount |
| double | zAccelIntegral |
Definition at line 20 of file Parcour.h.
|
|
Constructor.
Definition at line 24 of file Parcour.h. References arcDiffIntegral, blindCount, lastRobotPose, maxX, minX, startTime, updateCount, yDiffIntegral, and zAccelIntegral. |
|
|
Destructor.
|
|
|
start walking on the parcour: set start time, reset fitness stuff
Definition at line 14 of file Parcour.cpp. References arcDiffIntegral, blindCount, SystemCall::getCurrentSystemTime(), maxX, minX, startTime, updateCount, yDiffIntegral, and zAccelIntegral. Referenced by GT2004BasicBehaviorEvolveOmniParameters::execute(). |
Here is the call graph for this function:

|
||||||||||||||||
|
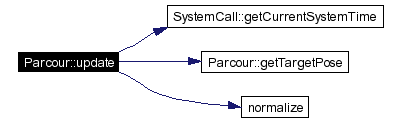
update the state of the parcour with all current data
Definition at line 27 of file Parcour.cpp. References arcDiffIntegral, blindCount, SystemCall::getCurrentSystemTime(), getTargetPose(), lastRobotPose, maxX, minX, normalize(), Pose2D::rotation, Pose2D::translation, updateCount, yDiffIntegral, Vector3< V >::z, and zAccelIntegral. Referenced by GT2004BasicBehaviorEvolveOmniParameters::execute(). |
Here is the call graph for this function:
|
|
return a MotionRequest that is useful at the moment to follow the parcour
Definition at line 43 of file Parcour.cpp. References getTargetPose(), lastRobotPose, Pose2D::minusDiff(), Pose2D::rotation, Pose2D::translation, and Vector2< double >::y. Referenced by GT2004BasicBehaviorEvolveOmniParameters::execute(). |
Here is the call graph for this function:

|
|
return something like speed in mm/s considering a useful portion of the integral errors
Definition at line 61 of file Parcour.cpp. References arcDiffIntegral, blindCount, idText, maxX, minX, OUTPUT, startTime, updateCount, yDiffIntegral, and zAccelIntegral. Referenced by GT2004BasicBehaviorEvolveOmniParameters::execute(). |
|
|
Implemented in ForwardTurningParcour, and SimpleBackwardParcour. Referenced by getMotionRequest(), and update(). |
|
|
Definition at line 41 of file Parcour.h. Referenced by getUnifiedSpeed(), Parcour(), start(), and update(). |
|
|
Definition at line 46 of file Parcour.h. Referenced by getUnifiedSpeed(), Parcour(), and start(). |
|
|
|
|
|
Definition at line 48 of file Parcour.h. Referenced by getMotionRequest(), Parcour(), and update(). |
|
|
Definition at line 49 of file Parcour.h. Referenced by getUnifiedSpeed(), Parcour(), start(), and update(). |
|
|
Definition at line 49 of file Parcour.h. Referenced by getUnifiedSpeed(), Parcour(), start(), and update(). |
|
|
Definition at line 50 of file Parcour.h. Referenced by getUnifiedSpeed(), Parcour(), start(), and update(). |
|
|
Definition at line 51 of file Parcour.h. Referenced by getUnifiedSpeed(), Parcour(), start(), and update(). |
|
|
Definition at line 52 of file Parcour.h. Referenced by getUnifiedSpeed(), Parcour(), start(), and update(). |
|
|
Definition at line 53 of file Parcour.h. Referenced by getUnifiedSpeed(), Parcour(), start(), and update(). |
 1.3.6
1.3.6