#include <ObstacleAvoiderOnGreenField.h>
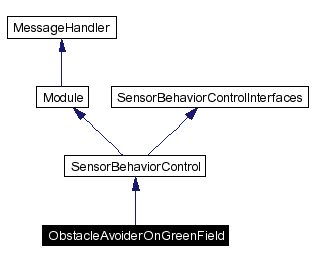
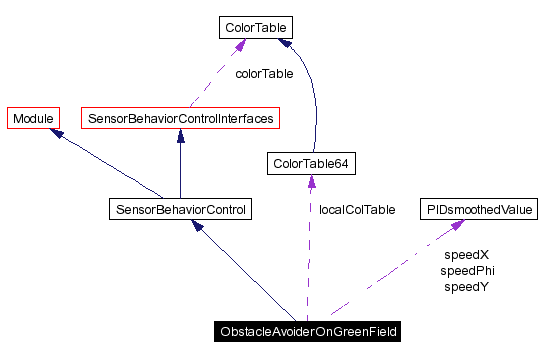
Inheritance diagram for ObstacleAvoiderOnGreenField:
Public Member Functions | |
| ObstacleAvoiderOnGreenField (const SensorBehaviorControlInterfaces &interfaces) | |
| Constructor. | |
| void | init () |
| some init's that are only done when the module is called for the first time (or it it hasn't been called for a while) such as setting the headcontrol-mode | |
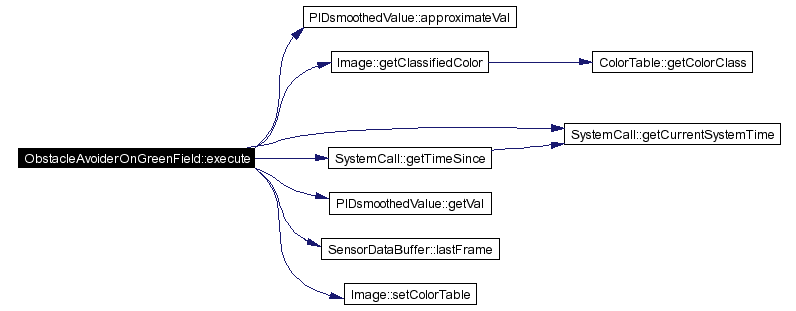
| virtual void | execute () |
| the "main" module where all the magic is happening | |
| void | calibrate () |
| calibrate the psd (while standing still) to the minimum value it measures | |
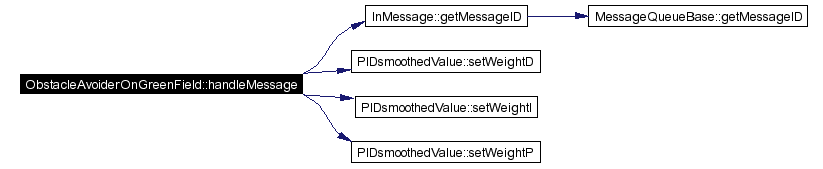
| virtual bool | handleMessage (InMessage &message) |
| currently no debug messages are handled | |
Private Member Functions | |
| DECLARE_DEBUG_IMAGE (classificationY) | |
Private Attributes | |
| double | maxSpeedX |
| double | distanceToGround |
| double | distanceOffset |
| double | distanceControlInterval |
| PIDsmoothedValue | speedX |
| PIDsmoothedValue | speedY |
| PIDsmoothedValue | speedPhi |
| int | gridSize |
| int | greenOrLight |
| unsigned long | timeOfLastExecute |
| unsigned long | timeToCalibrate |
| ColorTable64 | localColTable |
| bool | localColTableInitialized |
Definition at line 21 of file ObstacleAvoiderOnGreenField.h.
|
|
Constructor.
Definition at line 13 of file ObstacleAvoiderOnGreenField.cpp. |
|
|
some init's that are only done when the module is called for the first time (or it it hasn't been called for a while) such as setting the headcontrol-mode
Definition at line 28 of file ObstacleAvoiderOnGreenField.cpp. |
|
Here is the call graph for this function:
|
|
calibrate the psd (while standing still) to the minimum value it measures
Definition at line 208 of file ObstacleAvoiderOnGreenField.cpp. References ColorTable64::addColorClass(), Image::cameraInfo, ColorTable64::clear(), gridSize, Image::image, localColTable, localColTableInitialized, CameraInfo::resolutionHeight, and CameraInfo::resolutionWidth. |
Here is the call graph for this function:

|
|
currently no debug messages are handled
Reimplemented from Module. Definition at line 229 of file ObstacleAvoiderOnGreenField.cpp. References InMessage::bin, GenericDebugData::data, distanceControlInterval, distanceOffset, distanceToGround, InMessage::getMessageID(), GenericDebugData::id, idGenericDebugData, idText, OUTPUT, PIDsmoothedValue::setWeightD(), PIDsmoothedValue::setWeightI(), PIDsmoothedValue::setWeightP(), and speedPhi. |
Here is the call graph for this function:
|
|
|
|
|
Definition at line 44 of file ObstacleAvoiderOnGreenField.h. Referenced by execute(). |
|
|
Definition at line 44 of file ObstacleAvoiderOnGreenField.h. Referenced by execute(), and handleMessage(). |
|
|
Definition at line 44 of file ObstacleAvoiderOnGreenField.h. Referenced by execute(), and handleMessage(). |
|
|
Definition at line 44 of file ObstacleAvoiderOnGreenField.h. Referenced by execute(), and handleMessage(). |
|
|
Definition at line 45 of file ObstacleAvoiderOnGreenField.h. |
|
|
Definition at line 45 of file ObstacleAvoiderOnGreenField.h. |
|
|
Definition at line 45 of file ObstacleAvoiderOnGreenField.h. Referenced by execute(), and handleMessage(). |
|
|
Definition at line 46 of file ObstacleAvoiderOnGreenField.h. Referenced by calibrate(), and execute(). |
|
|
Definition at line 46 of file ObstacleAvoiderOnGreenField.h. |
|
|
Definition at line 47 of file ObstacleAvoiderOnGreenField.h. |
|
|
Definition at line 47 of file ObstacleAvoiderOnGreenField.h. Referenced by execute(). |
|
|
Definition at line 48 of file ObstacleAvoiderOnGreenField.h. Referenced by calibrate(), and execute(). |
|
|
Definition at line 49 of file ObstacleAvoiderOnGreenField.h. Referenced by calibrate(), and execute(). |
 1.3.6
1.3.6