#include <GT2004EdgeSpecialist.h>
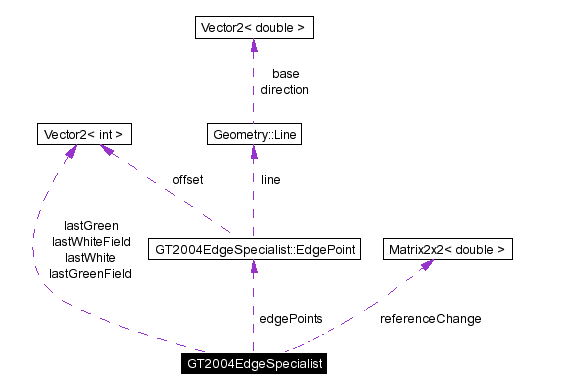
Collaboration diagram for GT2004EdgeSpecialist:
Public Member Functions | |
| GT2004EdgeSpecialist () | |
| void | reset () |
| reset all data before processing next frame. | |
| void | resetLine () |
| reset before next scanline. | |
| void | checkPoint (Vector2< int > point, colorClass color, const CameraMatrix &cameraMatrix, const CameraMatrix &prevCameraMatrix, const Image &image) |
| check point in camera-coordinates with given color on scanline if interesting changes. | |
| void | addCandidate (Vector2< int > point, const Image &image) |
| add a point in camera-coordinates which is a candidate for an edge point. | |
| void | getEdgesPercept (EdgesPercept &percept, const CameraMatrix &cameraMatrix, const CameraMatrix &prevCameraMatrix, const Image &image) |
| Searches for the edges based on the points and return edge-percepts from those. | |
Private Types | |
| enum | { maxNumberOfEdgePoints = 200 } |
Private Attributes | |
| bool | greenBefore |
| bool | whiteBefore |
| int | numberOfContinuousNoColor |
| Vector2< int > | lastGreen |
| Vector2< int > | lastGreenField |
| Vector2< int > | lastWhite |
| Vector2< int > | lastWhiteField |
| EdgePoint | edgePoints [maxNumberOfEdgePoints] |
| int | numOfEdgePoints |
| double | gradientThreshold |
| double | normDistance |
| double | normProjection |
| double | multipleAverageDistance |
| Matrix2x2< double > | referenceChange |
Definition at line 20 of file GT2004EdgeSpecialist.h.
|
|
Definition at line 62 of file GT2004EdgeSpecialist.h. |
|
|
Definition at line 15 of file GT2004EdgeSpecialist.cpp. References pi. |
|
|
reset all data before processing next frame.
Definition at line 42 of file GT2004EdgeSpecialist.cpp. References numOfEdgePoints. Referenced by GT2004ImageProcessor::execute(). |
|
|
reset before next scanline.
Definition at line 47 of file GT2004EdgeSpecialist.cpp. References greenBefore, numberOfContinuousNoColor, and whiteBefore. Referenced by GT2004ImageProcessor::scan(). |
|
||||||||||||||||||||||||
|
check point in camera-coordinates with given color on scanline if interesting changes.
Definition at line 54 of file GT2004EdgeSpecialist.cpp. References addCandidate(), Geometry::calculatePointOnField(), Image::cameraInfo, greenBefore, lastGreen, lastGreenField, lastWhite, noColor, numberOfContinuousNoColor, point, whiteBefore, Vector2< int >::x, and Vector2< int >::y. Referenced by GT2004ImageProcessor::scan(). |
Here is the call graph for this function:

|
||||||||||||
|
add a point in camera-coordinates which is a candidate for an edge point.
Definition at line 97 of file GT2004EdgeSpecialist.cpp. References Vector2< V >::abs(), GT2004EdgeSpecialist::EdgePoint::belongsToLineNo, DOT, edgePoints, gradientThreshold, idText, Image::image, Line, GT2004EdgeSpecialist::EdgePoint::line, maxNumberOfEdgePoints, Vector2< V >::normalize(), numOfEdgePoints, GT2004EdgeSpecialist::EdgePoint::offset, OUTPUT, point, referenceChange, GT2004EdgeSpecialist::EdgePoint::weight, Vector2< int >::x, and Vector2< int >::y. Referenced by checkPoint(). |
Here is the call graph for this function:

|
||||||||||||||||||||
|
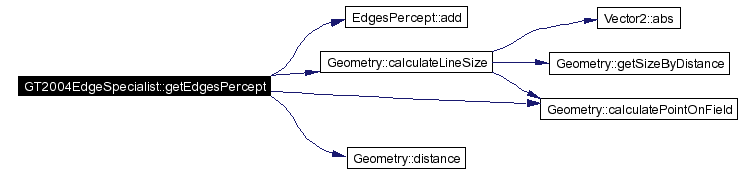
Searches for the edges based on the points and return edge-percepts from those.
Definition at line 142 of file GT2004EdgeSpecialist.cpp. References EdgesPercept::add(), ARROW, Geometry::Line::base, GT2004EdgeSpecialist::EdgePoint::belongsToLineNo, Geometry::calculateLineSize(), Geometry::calculatePointOnField(), Image::cameraInfo, Geometry::Line::direction, Geometry::distance(), DOT, edgePoints, LINE, GT2004EdgeSpecialist::EdgePoint::line, maxNumberOfEdgePoints, min, multipleAverageDistance, normDistance, normProjection, numOfEdgePoints, GT2004EdgeSpecialist::EdgePoint::offset, GT2004EdgeSpecialist::EdgePoint::weight, Vector2< V >::x, Vector2< int >::x, Vector2< double >::x, Vector2< V >::y, Vector2< double >::y, and Vector2< int >::y. Referenced by GT2004ImageProcessor::execute(). |
Here is the call graph for this function:
|
|
Definition at line 56 of file GT2004EdgeSpecialist.h. Referenced by checkPoint(), and resetLine(). |
|
|
Definition at line 57 of file GT2004EdgeSpecialist.h. Referenced by checkPoint(), and resetLine(). |
|
|
Definition at line 58 of file GT2004EdgeSpecialist.h. Referenced by checkPoint(), and resetLine(). |
|
|
Definition at line 59 of file GT2004EdgeSpecialist.h. Referenced by checkPoint(). |
|
|
Definition at line 59 of file GT2004EdgeSpecialist.h. Referenced by checkPoint(). |
|
|
Definition at line 60 of file GT2004EdgeSpecialist.h. Referenced by checkPoint(). |
|
|
Definition at line 60 of file GT2004EdgeSpecialist.h. |
|
|
Definition at line 70 of file GT2004EdgeSpecialist.h. Referenced by addCandidate(), and getEdgesPercept(). |
|
|
Definition at line 71 of file GT2004EdgeSpecialist.h. Referenced by addCandidate(), getEdgesPercept(), and reset(). |
|
|
Definition at line 72 of file GT2004EdgeSpecialist.h. Referenced by addCandidate(). |
|
|
Definition at line 73 of file GT2004EdgeSpecialist.h. Referenced by getEdgesPercept(). |
|
|
Definition at line 74 of file GT2004EdgeSpecialist.h. Referenced by getEdgesPercept(). |
|
|
Definition at line 75 of file GT2004EdgeSpecialist.h. Referenced by getEdgesPercept(). |
|
|
Definition at line 76 of file GT2004EdgeSpecialist.h. Referenced by addCandidate(). |
 1.3.6
1.3.6