#include <OdometrySelfLocator.h>
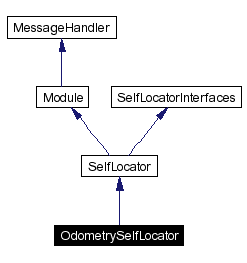
Inheritance diagram for OdometrySelfLocator:
Public Member Functions | |
| OdometrySelfLocator (const SelfLocatorInterfaces &interfaces) | |
| Constructor. | |
| ~OdometrySelfLocator () | |
| Destructor. | |
| virtual void | execute () |
| Executes the module. | |
Public Attributes | |
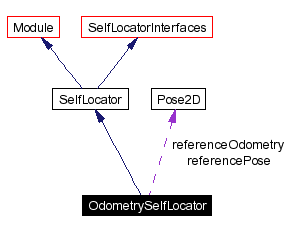
| Pose2D | referencePose |
| Pose2D | referenceOdometry |
| unsigned long int | timeOfLastExecute |
Definition at line 17 of file OdometrySelfLocator.h.
|
|
Constructor.
Definition at line 13 of file OdometrySelfLocator.cpp. References referencePose, Pose2D::rotation, Pose2D::translation, Vector2< double >::x, and Vector2< double >::y. |
|
|
Destructor.
Definition at line 29 of file OdometrySelfLocator.h. |
|
|
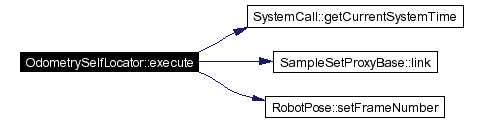
Executes the module.
Implements Module. Definition at line 23 of file OdometrySelfLocator.cpp. References SystemCall::getCurrentSystemTime(), SampleSetProxyBase::link(), PSDPercept::numOfPercepts, PSDPercept::percepts, referenceOdometry, referencePose, and RobotPose::setFrameNumber(). |
Here is the call graph for this function:
|
|
Definition at line 34 of file OdometrySelfLocator.h. Referenced by execute(), and OdometrySelfLocator(). |
|
|
Definition at line 35 of file OdometrySelfLocator.h. Referenced by execute(). |
|
|
Definition at line 36 of file OdometrySelfLocator.h. |
 1.3.6
1.3.6