#include <EvolutionSymbols.h>
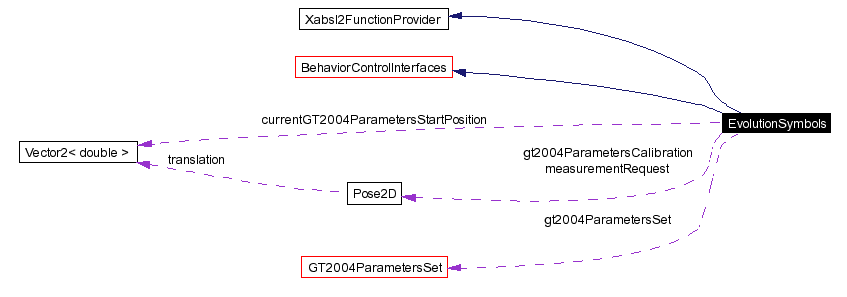
Inheritance diagram for EvolutionSymbols:
Public Member Functions | |
| EvolutionSymbols (const BehaviorControlInterfaces &interfaces, GT2004ParametersSet >2004ParametersSet, Pose2D *gt2004ParametersCalibration, int >2004CurrentIndex, Pose2D &measurementRequest, int &evolutionMode) | |
| void | registerSymbols (Xabsl2Engine &engine) |
| registers the symbols at an engine | |
| void | update () |
| updates the symbols | |
| bool | getCurrentGT2004ParametersMeasureBlind () |
| A function for the symbol "current-gt2004-parameters-measure-blind". | |
| double | getQualityOfCurrentGT2004Parameters () |
| Gives a percentage of how good current gt2004Parameters fullfill its purpose. | |
| void | estimateTimeToReachBall () |
| computes the estimated time to reach the ball | |
| void | computeRole () |
| computes the current role | |
Input symbols | |
| double | getRobotNumber () |
| bool | getAnotherPlayerIsInReadyState () |
| A function for the symbol "another-player-is-in-ready-state". | |
| bool | getAnotherTeammateIsPreparingAKick () |
| A function for the symbol "another-teammate-is-preparing-a-kick". | |
| bool | getAnotherTeammateIsPerformingAKick () |
| A function for the symbol "another-teammate-is-performing-a-kick". | |
| bool | getAnotherTeammateJustPerformedAKick () |
| A function for the symbol "another-teammate-just-performed-a-kick". | |
| bool | getTheStrikerIsPlayingNearTheOpponentGoal () |
| A function for the symbol "the-striker-is-playing-near-the-opponent-goal". | |
| bool | getTheStrikerIsNotPlayingNearTheOpponentGoal () |
| A function for the symbol "the-striker-is-not-playing-near-the-opponent-goal". | |
| bool | getTheStrikerIsPlayingNearTheOwnGoal () |
| A function for the symbol "the-striker-is-playing-near-the-own-goal". | |
| bool | getTheStrikerIsNotPlayingNearTheOwnGoal () |
| A function for the symbol "the-striker-is-not-playing-near-the-own-goal". | |
| bool | getCaught () |
| A funtion for the symbol "catch-ball". | |
| double | getCatchTime () |
| A function for the symbol "catch-ball-time". | |
| double | getSearchBallX () |
| A function for the symbol "search-ball.x". | |
Public Attributes | |
| double | estimatedTimeToReachBall |
| current estimated time to reach the ball | |
| unsigned long | timeOfLastGoodSelfLocalization |
| last time the robot pose validity was above 0.5 | |
| double | durationOfBadSelfLocalization |
| current duration since robot pose validity was above 0.5 (in s) | |
| Vector2< double > | currentGT2004ParametersStartPosition |
| a position useful for starting to measure the performance of the current GT2004Parameters | |
| double | currentGT2004ParametersStartDirection |
| a direction useful for starting to measure the performance of the current GT2004Parameters, must be in deg | |
| BehaviorTeamMessage::DynamicRole | role |
| current role | |
| unsigned long | timeWhenBallWasStartedToCatch |
| The time when the ball was started to catch. | |
| unsigned long | timeUntilBallWasCaught |
| The time until the ball was caught. | |
| bool | robotIsStuck |
| Indicates if the robot is stuck (based on obstacles model). | |
| bool | obstaclesAreClose |
| Indicates that there are close obstacles. | |
Private Attributes | |
| GT2004ParametersSet & | gt2004ParametersSet |
| GT2004 Evolution stuff. | |
| Pose2D * | gt2004ParametersCalibration |
| int & | gt2004CurrentIndex |
| Pose2D & | measurementRequest |
| int & | evolutionMode |
Definition at line 21 of file EvolutionSymbols.h.
|
||||||||||||||||||||||||||||
|
Definition at line 13 of file EvolutionSymbols.cpp. |
|
|
registers the symbols at an engine
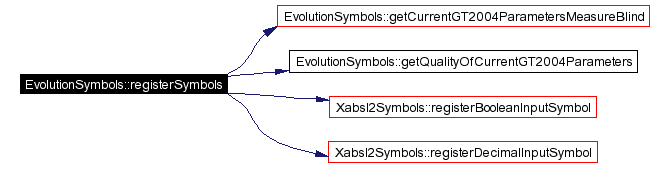
Definition at line 33 of file EvolutionSymbols.cpp. References currentGT2004ParametersStartDirection, currentGT2004ParametersStartPosition, durationOfBadSelfLocalization, getCurrentGT2004ParametersMeasureBlind(), getQualityOfCurrentGT2004Parameters(), Xabsl2Symbols::registerBooleanInputSymbol(), Xabsl2Symbols::registerDecimalInputSymbol(), Vector2< double >::x, and Vector2< double >::y. Referenced by GT2004BehaviorControl::registerSymbolsAndBasicBehaviors(). |
Here is the call graph for this function:
|
|
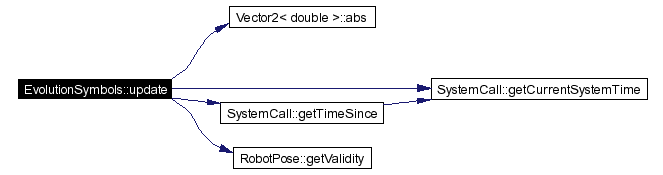
updates the symbols
Definition at line 50 of file EvolutionSymbols.cpp. References Vector2< double >::abs(), currentGT2004ParametersStartDirection, currentGT2004ParametersStartPosition, durationOfBadSelfLocalization, SystemCall::getCurrentSystemTime(), SystemCall::getTimeSince(), RobotPose::getValidity(), pi, Pose2D::rotation, timeOfLastGoodSelfLocalization, Pose2D::translation, Vector2< double >::x, and Vector2< double >::y. Referenced by GT2004BehaviorControl::execute(). |
Here is the call graph for this function:
|
|
A function for the symbol "current-gt2004-parameters-measure-blind".
Definition at line 161 of file EvolutionSymbols.cpp. References Vector2< double >::abs(), Pose2D::rotation, and Pose2D::translation. Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
Gives a percentage of how good current gt2004Parameters fullfill its purpose.
Definition at line 168 of file EvolutionSymbols.cpp. Referenced by registerSymbols(). |
|
|
computes the estimated time to reach the ball
|
|
|
computes the current role
|
|
|
Definition at line 73 of file EvolutionSymbols.h. References getPlayer(), and Player::getPlayerNumber(). |
Here is the call graph for this function:

|
|
A function for the symbol "another-player-is-in-ready-state".
|
|
|
A function for the symbol "another-teammate-is-preparing-a-kick".
|
|
|
A function for the symbol "another-teammate-is-performing-a-kick".
|
|
|
A function for the symbol "another-teammate-just-performed-a-kick".
|
|
|
A function for the symbol "the-striker-is-playing-near-the-opponent-goal".
|
|
|
A function for the symbol "the-striker-is-not-playing-near-the-opponent-goal".
|
|
|
A function for the symbol "the-striker-is-playing-near-the-own-goal".
|
|
|
A function for the symbol "the-striker-is-not-playing-near-the-own-goal".
|
|
|
A funtion for the symbol "catch-ball".
|
|
|
A function for the symbol "catch-ball-time".
|
|
|
A function for the symbol "search-ball.x".
|
|
|
current estimated time to reach the ball
Definition at line 42 of file EvolutionSymbols.h. |
|
|
last time the robot pose validity was above 0.5
Definition at line 45 of file EvolutionSymbols.h. Referenced by update(). |
|
|
current duration since robot pose validity was above 0.5 (in s)
Definition at line 47 of file EvolutionSymbols.h. Referenced by registerSymbols(), and update(). |
|
|
a position useful for starting to measure the performance of the current GT2004Parameters
Definition at line 50 of file EvolutionSymbols.h. Referenced by registerSymbols(), and update(). |
|
|
a direction useful for starting to measure the performance of the current GT2004Parameters, must be in deg
Definition at line 52 of file EvolutionSymbols.h. Referenced by registerSymbols(), and update(). |
|
|
current role
Definition at line 62 of file EvolutionSymbols.h. |
|
|
The time when the ball was started to catch.
Definition at line 111 of file EvolutionSymbols.h. |
|
|
The time until the ball was caught.
Definition at line 114 of file EvolutionSymbols.h. |
|
|
Indicates if the robot is stuck (based on obstacles model).
Definition at line 117 of file EvolutionSymbols.h. |
|
|
Indicates that there are close obstacles.
Definition at line 120 of file EvolutionSymbols.h. |
|
|
GT2004 Evolution stuff.
Definition at line 124 of file EvolutionSymbols.h. |
|
|
Definition at line 125 of file EvolutionSymbols.h. |
|
|
Definition at line 126 of file EvolutionSymbols.h. |
|
|
Definition at line 127 of file EvolutionSymbols.h. |
|
|
Definition at line 128 of file EvolutionSymbols.h. |
 1.3.6
1.3.6