#include <Actionfield.h>
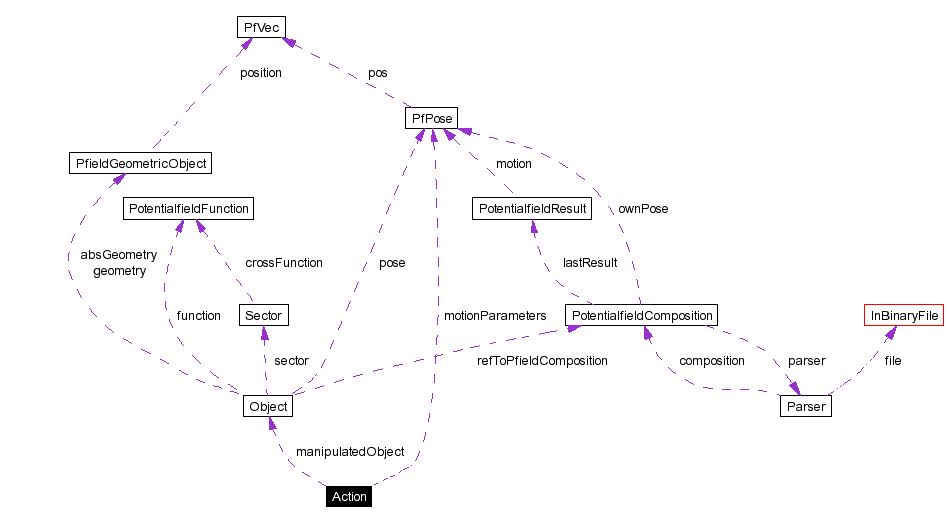
Collaboration diagram for Action:
Public Member Functions | |
| Action () | |
| Constructor. | |
| ~Action () | |
| Destructor. | |
| Action (const Action &a) | |
| Copy-Constructor. | |
| bool | canBeApplied (const PfPose &robotPose, const std::vector< Object * > &objects) |
| Checks if this Action can be applied. | |
Public Attributes | |
| std::string | name |
| The name of the action. | |
| Object * | manipulatedObject |
| The manipulated object. | |
| unsigned int | objectIdx |
| Index of the manipulated object in a dynamicObjects field (for internal use). | |
| bool | joinAction |
| Flag, true if the robot joins the action. | |
| std::vector< Polygon > | impactAreas |
| The impact areas. | |
| std::vector< PotentialfieldTransformation * > | transformations |
| The transformations. | |
| ActionType | actionType |
| The type of the action. | |
| PfPose | motionParameters |
| Motion parameters resulting from some transformations. | |
| double | time |
| The time this action takes. | |
Protected Member Functions | |
| bool | poseInsideImpactArea (const PfPose &robPose, const PfPose &objPose) |
| Checks if a single pose is inside any of the robot's impact areas. | |
Definition at line 40 of file Actionfield.h.
|
|
Constructor.
Definition at line 17 of file Actionfield.cpp. References manipulatedObject. |
|
|
Destructor.
Definition at line 24 of file Actionfield.cpp. References impactAreas, and transformations. |
|
|
Copy-Constructor.
Definition at line 36 of file Actionfield.cpp. References actionType, impactAreas, joinAction, manipulatedObject, name, and transformations. |
|
||||||||||||
|
Checks if this Action can be applied.
Definition at line 51 of file Actionfield.cpp. References actionType, PfPose::hasProbabilityDistribution, MEASURE_OBJECT, MEASURE_SELF, MOVE_SELF, objectIdx, poseInsideImpactArea(), and PfPose::probabilityDistribution. Referenced by FutureWorldModelGenerator::executeSingleTransformation(). |
Here is the call graph for this function:

|
||||||||||||
|
Checks if a single pose is inside any of the robot's impact areas.
Definition at line 122 of file Actionfield.cpp. References impactAreas, PfPose::pos, PfVec::rotate(), and PfPose::rotation. Referenced by canBeApplied(). |
Here is the call graph for this function:

|
|
The name of the action.
Definition at line 44 of file Actionfield.h. Referenced by Action(), and Parser::parseActionfield(). |
|
|
The manipulated object.
Definition at line 46 of file Actionfield.h. Referenced by Action(), Actionfield::addManipulatedObject(), and Parser::parseAction(). |
|
|
Index of the manipulated object in a dynamicObjects field (for internal use).
Definition at line 48 of file Actionfield.h. Referenced by Actionfield::addManipulatedObject(), canBeApplied(), Actionfield::computeActionValue(), FutureWorldModelGenerator::executeSingleTransformation(), and FutureWorldModelGenerator::transformWorldState(). |
|
|
Flag, true if the robot joins the action.
Definition at line 50 of file Actionfield.h. Referenced by Action(), FutureWorldModelGenerator::executeSingleTransformation(), Parser::parseAction(), and FutureWorldModelGenerator::transformWorldState(). |
|
|
The impact areas.
Definition at line 52 of file Actionfield.h. Referenced by Action(), Parser::parseAction(), poseInsideImpactArea(), and ~Action(). |
|
|
The transformations.
Definition at line 54 of file Actionfield.h. Referenced by Action(), Parser::parseAction(), FutureWorldModelGenerator::transformWorldState(), and ~Action(). |
|
|
The type of the action.
Definition at line 56 of file Actionfield.h. Referenced by Action(), canBeApplied(), Actionfield::computeActionValue(), FutureWorldModelGenerator::executeSingleTransformation(), Parser::parseAction(), and FutureWorldModelGenerator::transformWorldState(). |
|
|
Motion parameters resulting from some transformations.
Definition at line 58 of file Actionfield.h. Referenced by FutureWorldModelGenerator::executeSingleTransformation(). |
|
|
The time this action takes.
Definition at line 60 of file Actionfield.h. Referenced by FutureWorldModelGenerator::transformWorldState(). |
 1.3.6
1.3.6