#include <TeamBallLocator.h>
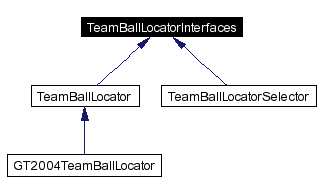
Inheritance diagram for TeamBallLocatorInterfaces:

Public Member Functions | |
| TeamBallLocatorInterfaces (const SeenBallPosition &seenBallPosition, const OdometryData &odometryData, const RobotPose &robotPose, const TeamMessageCollection &teamMessageCollection, CommunicatedBallPosition &communicatedBallPosition) | |
| Constructor. | |
Public Attributes | |
| const SeenBallPosition & | seenBallPosition |
| The position of the seen ball. | |
| const OdometryData & | odometryData |
| The odometry data provided by the motion modules. | |
| const RobotPose & | robotPose |
| The robots position that was calculated last. | |
| const TeamMessageCollection & | teamMessageCollection |
| Incoming team messages from other robots. | |
| CommunicatedBallPosition & | communicatedBallPosition |
| The communicated ball position to be calculated by the module. | |
Definition at line 24 of file TeamBallLocator.h.
|
||||||||||||||||||||||||
|
Constructor.
Definition at line 28 of file TeamBallLocator.h. |
|
|
The position of the seen ball.
Definition at line 43 of file TeamBallLocator.h. |
|
|
The odometry data provided by the motion modules.
Definition at line 46 of file TeamBallLocator.h. |
|
|
The robots position that was calculated last.
Definition at line 49 of file TeamBallLocator.h. |
|
|
Incoming team messages from other robots.
Definition at line 52 of file TeamBallLocator.h. |
|
|
The communicated ball position to be calculated by the module.
Definition at line 55 of file TeamBallLocator.h. |
 1.3.6
1.3.6