#include <RobotPoseSymbols.h>
Inheritance diagram for RobotPoseSymbols:
Definition at line 22 of file RobotPoseSymbols.h.
|
|
The angle that is shown by the top white LEDs.
Definition at line 63 of file RobotPoseSymbols.h. |
|
|
Definition at line 15 of file RobotPoseSymbols.cpp. |
|
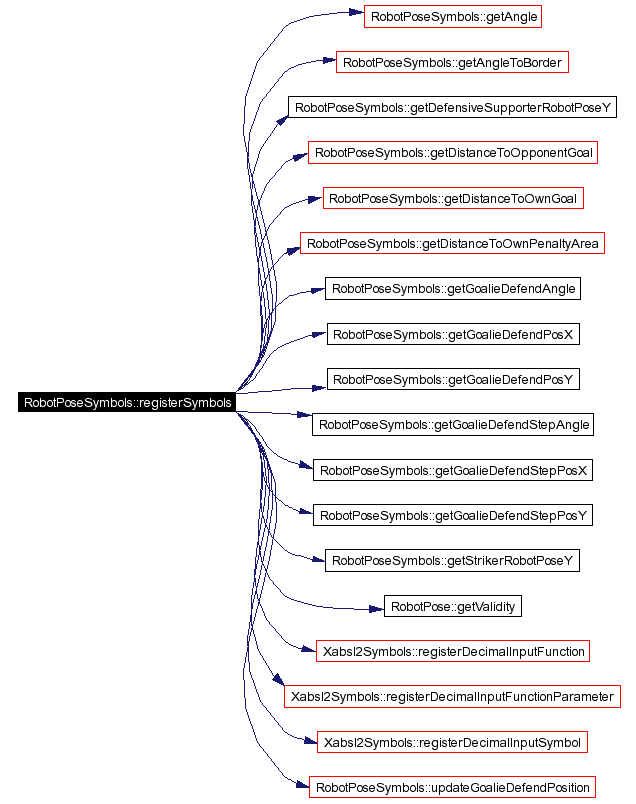
Here is the call graph for this function:
|
|
updates the symbols
Definition at line 69 of file RobotPoseSymbols.cpp. Referenced by GT2004BehaviorControl::execute(). |
|
|
calculates the value for the symbol "robot-pose.best-angle-away-from-own-goal" |
|
|
A function for the symbol "robot-pose.angle" Definition at line 73 of file RobotPoseSymbols.cpp. References Pose2D::rotation, and toDegrees(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "robot-pose.angle-to-border" Definition at line 78 of file RobotPoseSymbols.cpp. References RobotPose::angleToBorder, and toDegrees(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "robot-pose.distance-to-own-goal" Definition at line 84 of file RobotPoseSymbols.cpp. References Geometry::distanceTo(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "robot-pose.distance-to-own-penalty-area" Definition at line 90 of file RobotPoseSymbols.cpp. References FieldDimensions::distanceToOwnPenaltyArea(), and Pose2D::translation. Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "robot-pose.distance-to-opponent-goal" Definition at line 95 of file RobotPoseSymbols.cpp. References Geometry::distanceTo(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
calculates the value for the symbol "defensive-supporter.robot-pose.y" Definition at line 101 of file RobotPoseSymbols.cpp. Referenced by registerSymbols(). |
|
|
calculates the value for the symbol "striker.robot-pose.y" Definition at line 118 of file RobotPoseSymbols.cpp. Referenced by registerSymbols(). |
|
|
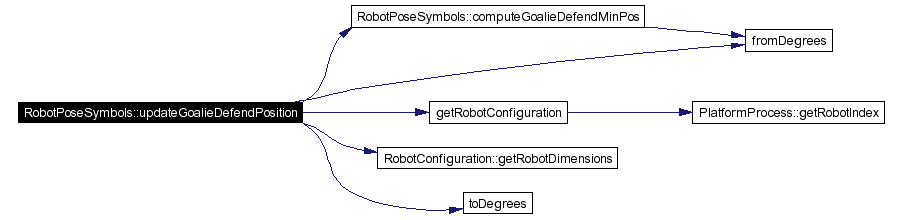
calculates the values for the symbols "robot-pose.goalie-defend-angle","robot-pose.goalie-defend-pos-x","robot-pose.goalie-defend-pos-y","robot-pose.goalie-defend-step-pos-x","robot-pose.goalie-defend-step-pos-y","robot-pose.goalie-defend-step-angle" Definition at line 165 of file RobotPoseSymbols.cpp. References ballPosX, ballPosY, computeGoalieDefendMinPos(), fromDegrees(), getRobotConfiguration(), RobotConfiguration::getRobotDimensions(), goalieDefendAngle, goalieDefendMinPosX, goalieDefendMinPosY, goalieDefendPositionX, goalieDefendPositionY, goalieDefendRadius, goalieDefendRadiusMax, goalieDefendRadiusMin, goalieDefendStepAngle, goalieDefendStepPosX, goalieDefendStepPosY, Pose2D::rotation, RobotDimensions::shoulderWidth, toDegrees(), Pose2D::translation, Vector2< double >::x, and Vector2< double >::y. Referenced by registerSymbols(). |
Here is the call graph for this function:
|
|
returns the Symbol "robot-pose.goalie-defend-angle" Definition at line 135 of file RobotPoseSymbols.cpp. References goalieDefendAngle. Referenced by registerSymbols(). |
|
|
returns the Symbol "robot-pose.goalie-defend-pos-x" Definition at line 145 of file RobotPoseSymbols.cpp. References goalieDefendPositionY. Referenced by registerSymbols(). |
|
|
returns the Symbol "robot-pose.goalie-defend-pos-y" Definition at line 140 of file RobotPoseSymbols.cpp. References goalieDefendPositionX. Referenced by registerSymbols(). |
|
|
returns the Symbol "robot-pose.goalie-defend-step-pos-x" Definition at line 150 of file RobotPoseSymbols.cpp. References goalieDefendStepPosX. Referenced by registerSymbols(). |
|
|
returns the Symbol "robot-pose.goalie-defend-step-pos-y" Definition at line 155 of file RobotPoseSymbols.cpp. References goalieDefendStepPosY. Referenced by registerSymbols(). |
|
|
returns the Symbol "robot-pose.goalie-defend-step-angle" Definition at line 160 of file RobotPoseSymbols.cpp. References goalieDefendStepAngle. Referenced by registerSymbols(). |
|
||||||||||||
|
calculates the values for the variables 'goalieDefendMinPosX','goalieDefendMinPosY','goalieDefendMinAngle' needed for the function 'updateGoalieDefendPosition' Definition at line 306 of file RobotPoseSymbols.cpp. References RobotDimensions::bodyWidth, fromDegrees(), goalieDefendMinPosX, goalieDefendMinPosY, goalieDefendRadiusMin, and RobotDimensions::shoulderWidth. Referenced by updateGoalieDefendPosition(). |
Here is the call graph for this function:

|
|
|
|
|
the Parameter "robot-pose.update-goalie-defend-position.ball-pos-x" for the decimal input function "robot-pose.update-goalie-defend-position" Definition at line 54 of file RobotPoseSymbols.h. Referenced by registerSymbols(), and updateGoalieDefendPosition(). |
|
|
the Parameter "robot-pose.update-goalie-defend-position.ball-pos-y" for the decimal input function "robot-pose.update-goalie-defend-position" Definition at line 55 of file RobotPoseSymbols.h. Referenced by registerSymbols(), and updateGoalieDefendPosition(). |
|
|
Definition at line 74 of file RobotPoseSymbols.h. |
|
|
Definition at line 76 of file RobotPoseSymbols.h. |
|
|
Definition at line 78 of file RobotPoseSymbols.h. Referenced by getGoalieDefendAngle(), and updateGoalieDefendPosition(). |
|
|
Definition at line 79 of file RobotPoseSymbols.h. Referenced by getGoalieDefendPosX(), and updateGoalieDefendPosition(). |
|
|
Definition at line 80 of file RobotPoseSymbols.h. Referenced by getGoalieDefendPosY(), and updateGoalieDefendPosition(). |
|
|
Definition at line 81 of file RobotPoseSymbols.h. Referenced by getGoalieDefendStepPosX(), and updateGoalieDefendPosition(). |
|
|
Definition at line 82 of file RobotPoseSymbols.h. Referenced by getGoalieDefendStepPosY(), and updateGoalieDefendPosition(). |
|
|
Definition at line 83 of file RobotPoseSymbols.h. Referenced by getGoalieDefendStepAngle(), and updateGoalieDefendPosition(). |
|
|
Definition at line 84 of file RobotPoseSymbols.h. Referenced by updateGoalieDefendPosition(). |
|
|
Definition at line 85 of file RobotPoseSymbols.h. Referenced by computeGoalieDefendMinPos(), and updateGoalieDefendPosition(). |
|
|
Definition at line 86 of file RobotPoseSymbols.h. Referenced by computeGoalieDefendMinPos(), and updateGoalieDefendPosition(). |
|
|
Definition at line 87 of file RobotPoseSymbols.h. Referenced by computeGoalieDefendMinPos(), and updateGoalieDefendPosition(). |
|
|
Definition at line 88 of file RobotPoseSymbols.h. Referenced by updateGoalieDefendPosition(). |
 1.3.6
1.3.6