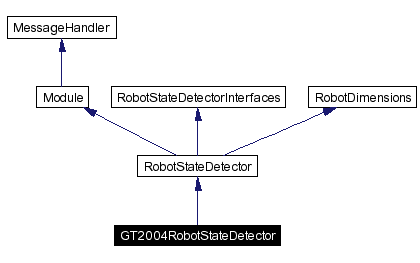
#include <GT2004RobotStateDetector.h>
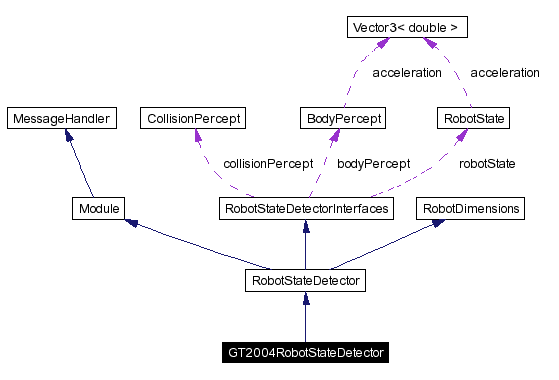
Inheritance diagram for GT2004RobotStateDetector:
Public Member Functions | |
| GT2004RobotStateDetector (const RobotStateDetectorInterfaces &interfaces) | |
| Constructor. | |
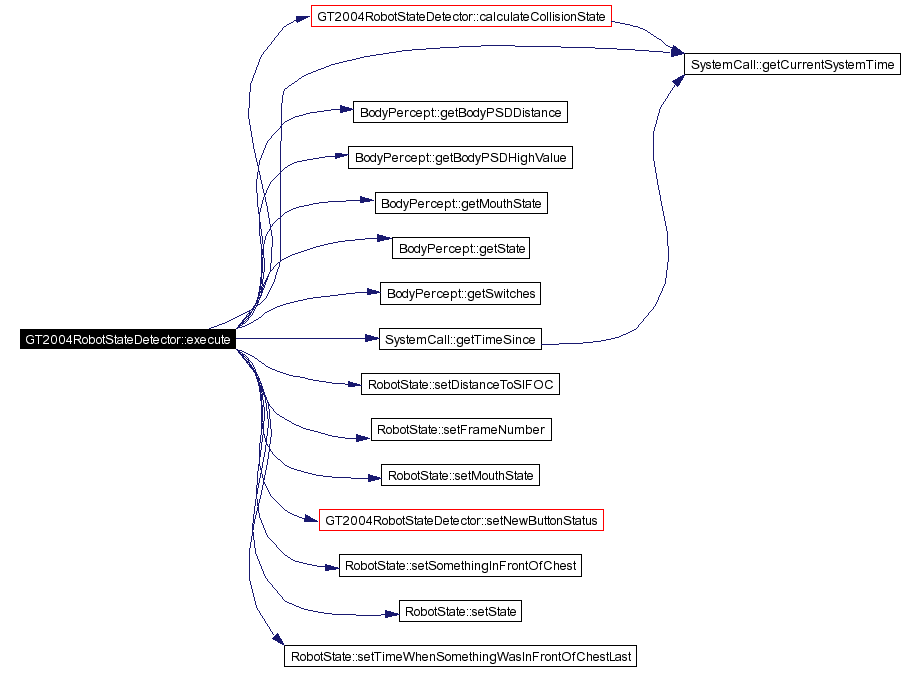
| virtual void | execute () |
| Executes the module. | |
Private Types | |
| enum | { middle = 0, left, right, robotSides } |
| enum | { maxFrameHistory = 200 } |
Private Member Functions | |
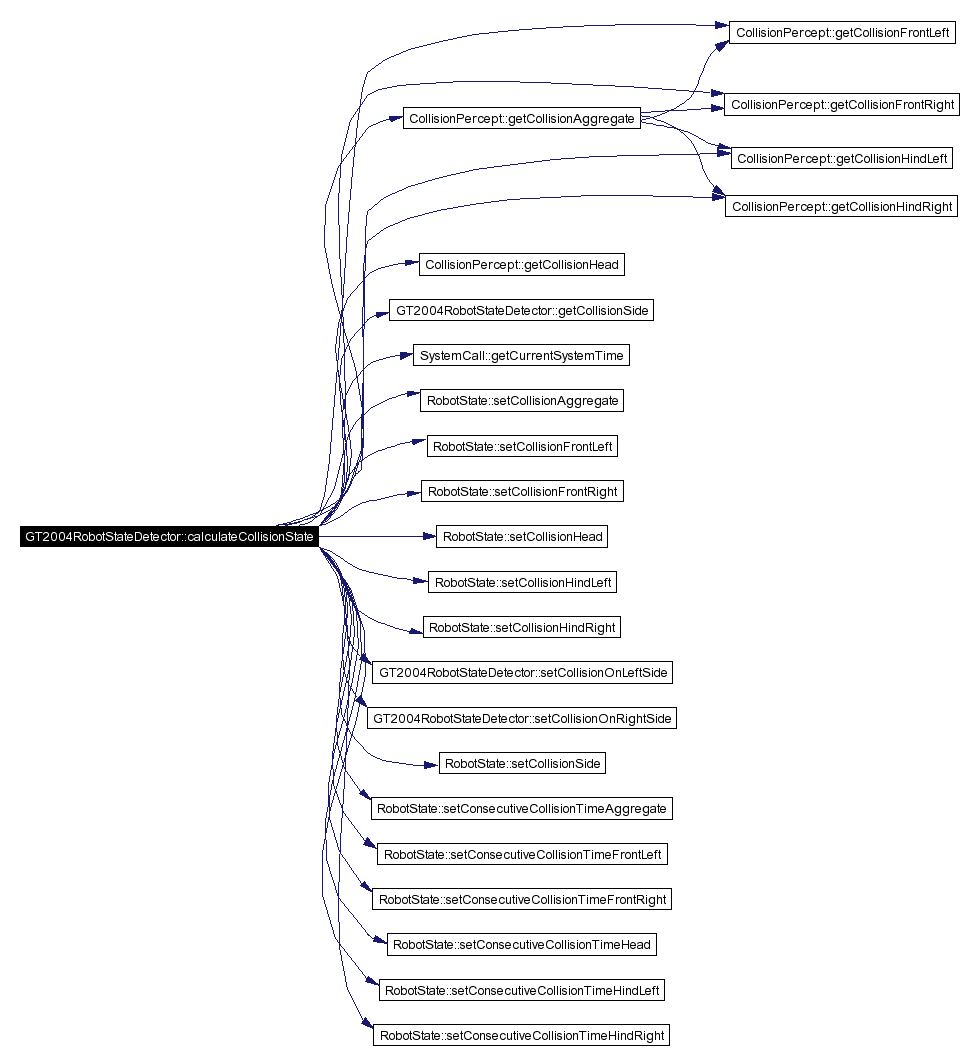
| void | calculateCollisionState () |
| void | setNewButtonStatus () |
| int | getCollisionSide () |
| Did collision occur at front left leg. | |
| void | setCollisionOnLeftSide (bool collision) |
| void | setCollisionOnRightSide (bool collision) |
Private Attributes | |
| bool | switchDown [BodyPercept::numOfSwitches] |
| long | switchDownTime [BodyPercept::numOfSwitches] |
| long | timeSinceLastCollision [6] |
| long | consecutiveCollisionTime [6] |
| long | remindCollision |
| bool | numOfCollisions [maxFrameHistory][robotSides] |
| bool | buttonPressed [BodyPercept::numOfSwitches] |
| long | buttonTime [BodyPercept::numOfSwitches] |
| long | buttonPressedTime [BodyPercept::numOfSwitches] |
| long | buttonDuration [BodyPercept::numOfSwitches] |
| bool | anyBackButtonPressed |
| long | anyBackButtonTime |
| long | anyBackButtonPressedTime |
| long | anyBackButtonDuration |
|
|
Definition at line 50 of file GT2004RobotStateDetector.h. |
|
|
Definition at line 55 of file GT2004RobotStateDetector.h. |
|
|
Constructor.
Definition at line 12 of file GT2004RobotStateDetector.cpp. References consecutiveCollisionTime, maxFrameHistory, numOfCollisions, remindCollision, robotSides, setNewButtonStatus(), switchDown, and timeSinceLastCollision. |
Here is the call graph for this function:

|
Here is the call graph for this function:
|
Here is the call graph for this function:
|
Here is the call graph for this function:
|
|
Did collision occur at front left leg.
Definition at line 311 of file GT2004RobotStateDetector.cpp. References maxFrameHistory, middle, and numOfCollisions. Referenced by calculateCollisionState(). |
|
|
Definition at line 327 of file GT2004RobotStateDetector.cpp. References CollisionPercept::frameNumber, maxFrameHistory, and numOfCollisions. Referenced by calculateCollisionState(). |
|
|
Definition at line 332 of file GT2004RobotStateDetector.cpp. References CollisionPercept::frameNumber, maxFrameHistory, and numOfCollisions. Referenced by calculateCollisionState(). |
|
|
Definition at line 41 of file GT2004RobotStateDetector.h. Referenced by execute(), and GT2004RobotStateDetector(). |
|
|
Definition at line 42 of file GT2004RobotStateDetector.h. Referenced by execute(). |
|
|
Definition at line 43 of file GT2004RobotStateDetector.h. Referenced by calculateCollisionState(), and GT2004RobotStateDetector(). |
|
|
Definition at line 44 of file GT2004RobotStateDetector.h. Referenced by calculateCollisionState(), and GT2004RobotStateDetector(). |
|
|
Definition at line 45 of file GT2004RobotStateDetector.h. Referenced by calculateCollisionState(), and GT2004RobotStateDetector(). |
|
|
Definition at line 57 of file GT2004RobotStateDetector.h. Referenced by getCollisionSide(), GT2004RobotStateDetector(), setCollisionOnLeftSide(), and setCollisionOnRightSide(). |
|
|
Definition at line 61 of file GT2004RobotStateDetector.h. |
|
|
Definition at line 62 of file GT2004RobotStateDetector.h. |
|
|
Definition at line 63 of file GT2004RobotStateDetector.h. |
|
|
Definition at line 64 of file GT2004RobotStateDetector.h. |
|
|
Definition at line 65 of file GT2004RobotStateDetector.h. |
|
|
Definition at line 66 of file GT2004RobotStateDetector.h. |
|
|
Definition at line 67 of file GT2004RobotStateDetector.h. |
|
|
Definition at line 68 of file GT2004RobotStateDetector.h. |
 1.3.6
1.3.6